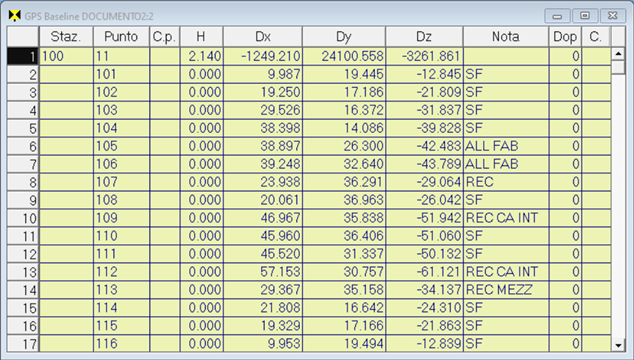
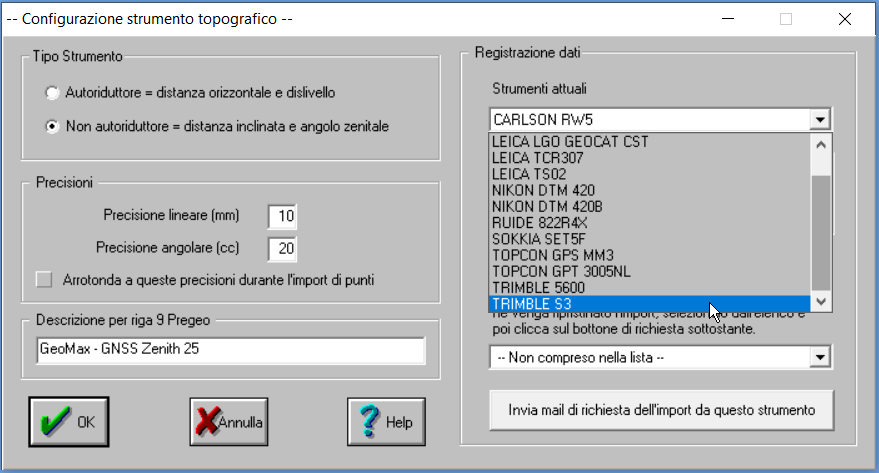
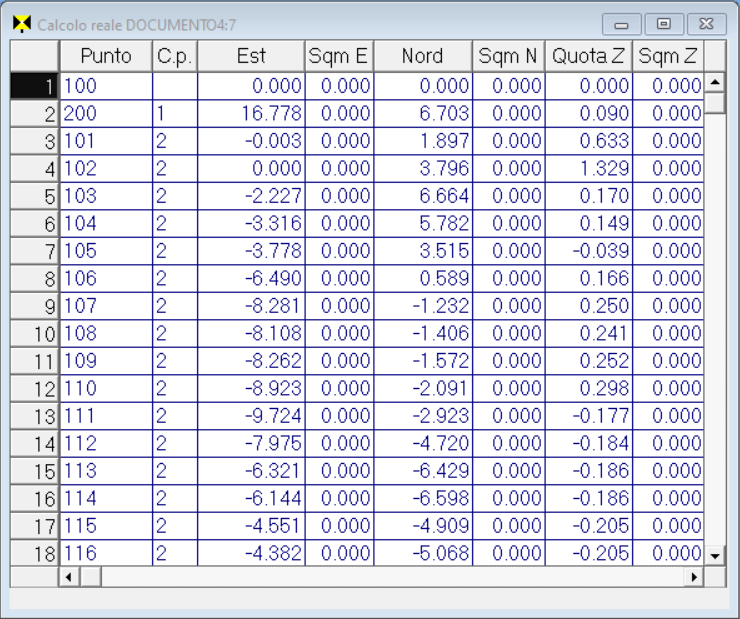
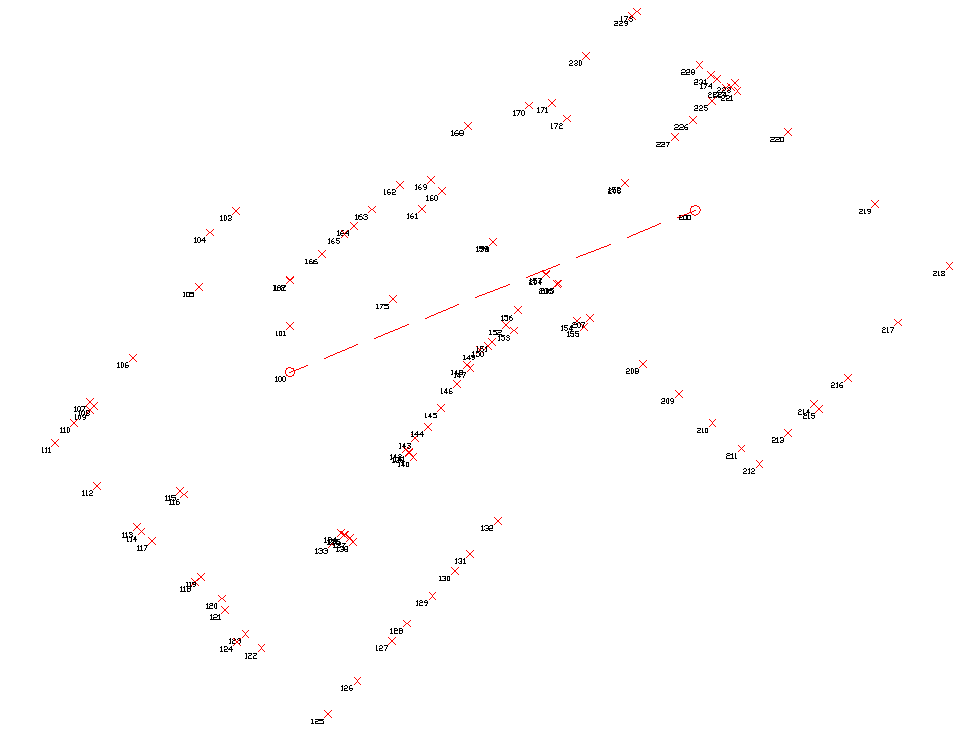
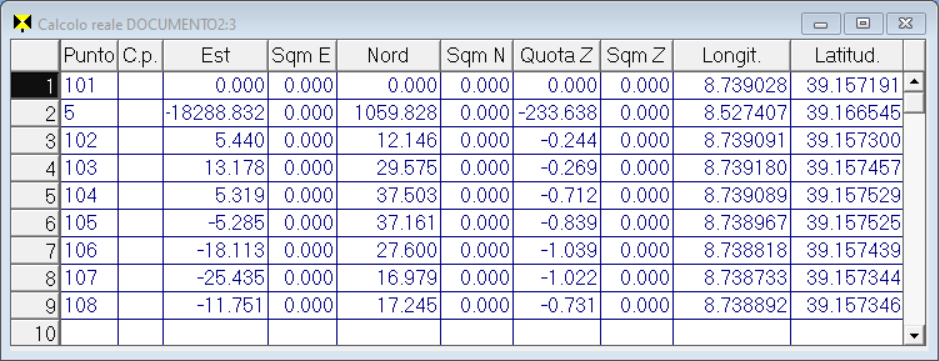
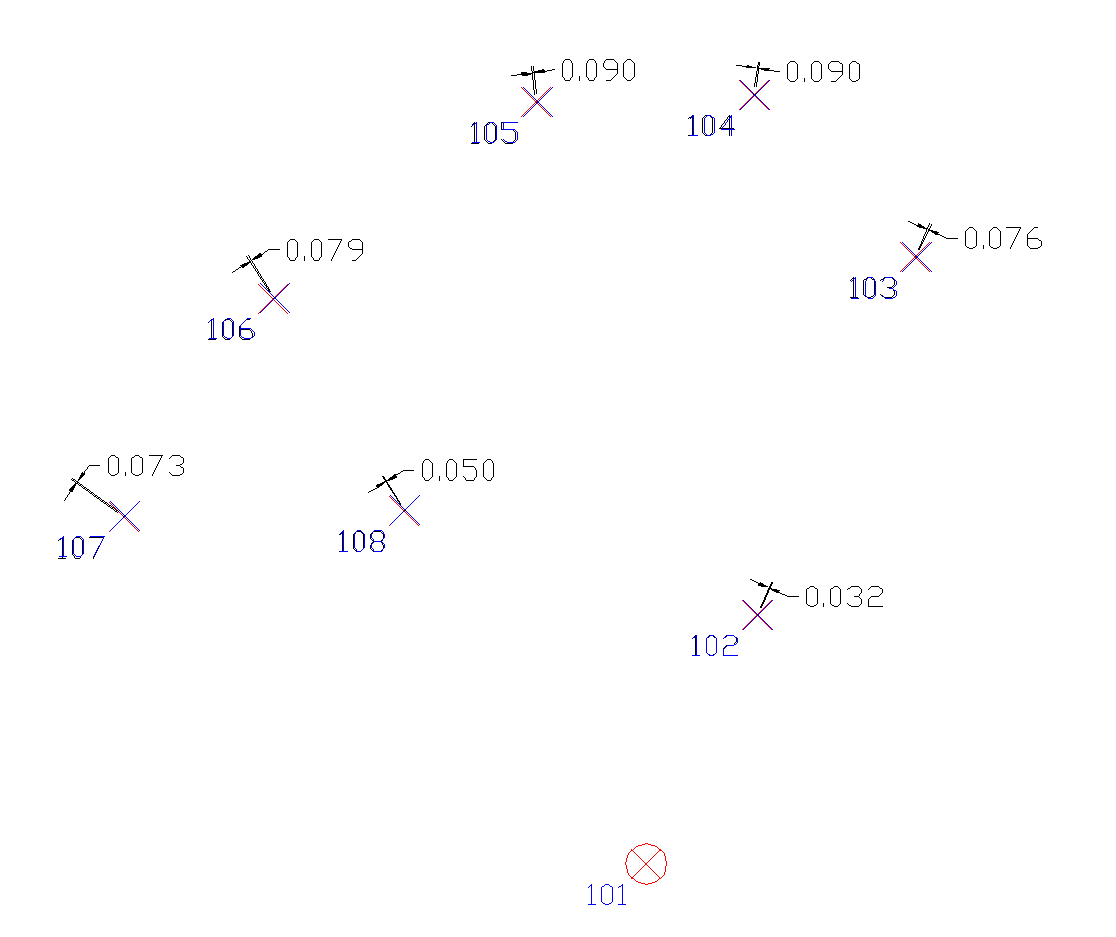
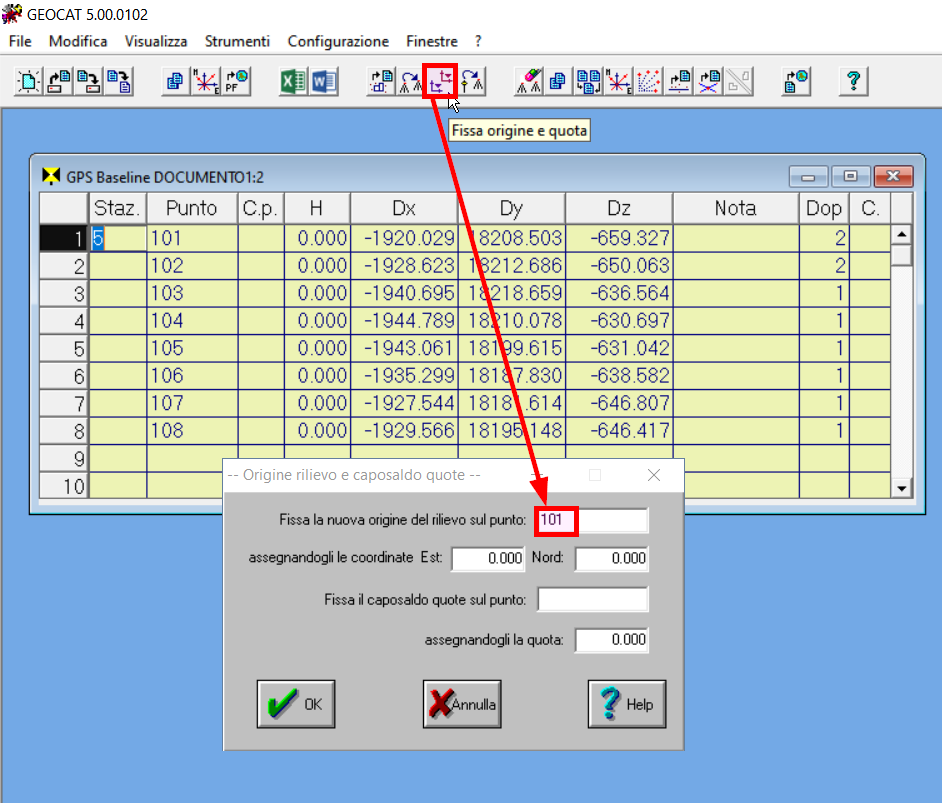
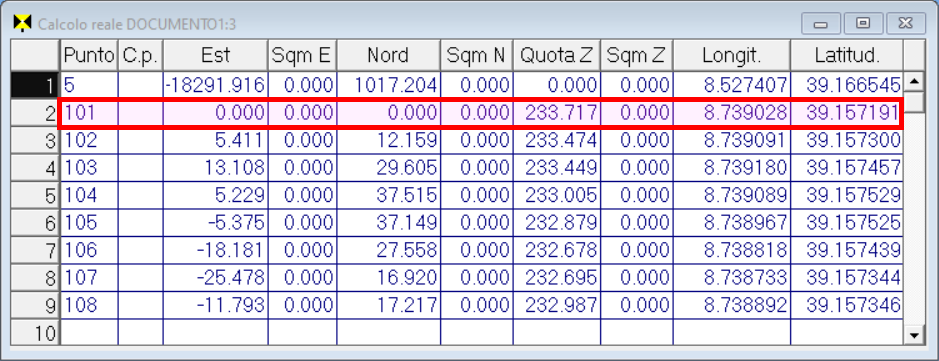
Salve, mi accodo a questa discussione in quanto ho riscontrato una differenza tra il disegno cad restituito da geocat dopo aver importato il file rw5 e il disegno cad restituito da programma di scarico dati stonex. Base gps rtcm lontana, riscontro differenze di circa 60 cm sui punti rilevati.
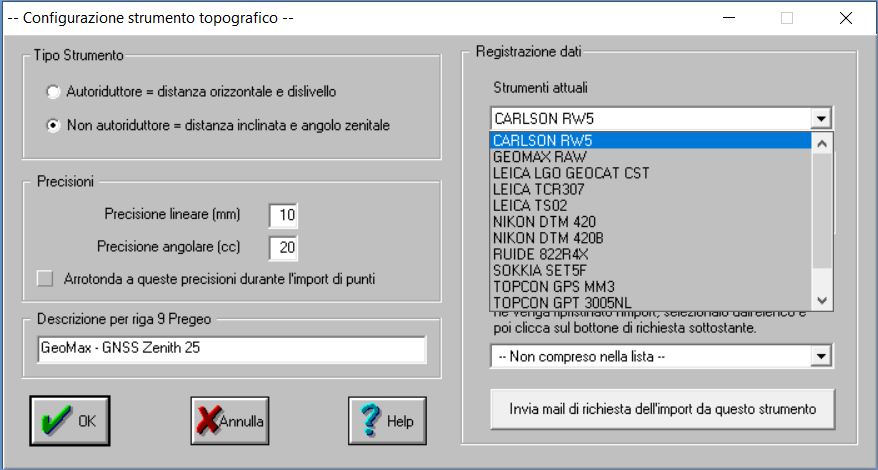
Strumento utilizzato gps stonex S8+.
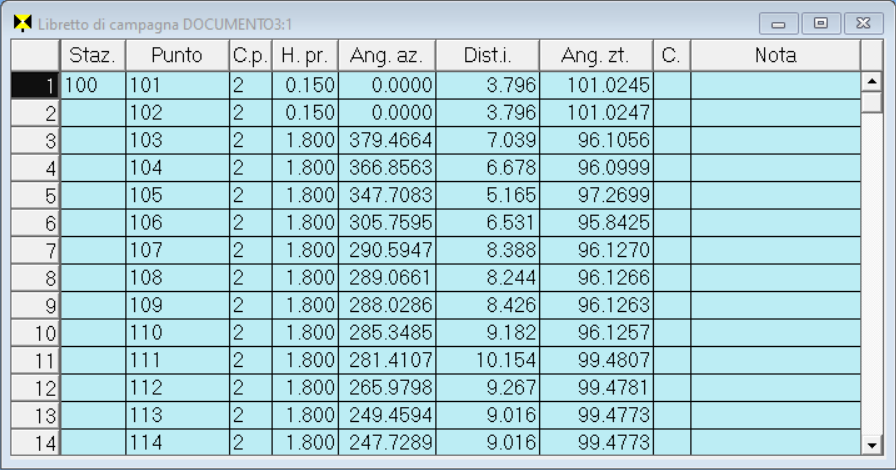
inserisco di seguito il contenuto del file di prova per verificare l’anomalia in questione:
JB,NMprova geocat,DT07-06-2020,TM19:46:51
MO,AD0,UN1,SF1.00000000,EC0,EO0.0,AU0
–Stonex SurvCE Version 5.02
–CRD: Alphanumeric
–Definito da Utente: UTM/ETRS89/UTM zone 32N
–Equipment: Stonex, S8+, SN:STNS86152007, FW:S8-160511V1.24
–Antenna Type: [STXS8PX003A NONE],RA0.0930m,SHMP0.0620m,L10.0871m,L20.0928m,–Integrated GPS L1/L2+L2C/L5, GLONASS, Ga
–File Localizzazione: Nessuno
–File Separazione Geoide: Nessuno
–Grid Adjustment File: Nessuno
–Scala GPS: 1.00000000
–Scale Point not used
–RTK Method: RTCM V3.0, Device: GSM Interno, Network: NTRIP CARBONIA31
BP,PN5,LA39.095956210980,LN8.313866567088,EL167.7710,AG0.0000,PA0.0920,ATARP,SRROVER,–
–Entered Rover HR: 2.5500 m, Vertical
LS,HR2.6371
GPS,PN101,LA39.092588662000,LN8.442049962600,EL231.040000,–
–GS,PN101,N 4334252.8688,E 477452.0192,EL228.4029,–
G0,2020/07/06 17:46:18,(Average) - Base ID read at rover: 0005
G1,BP5,PN101,DX-2048.66697,DY18189.21657,DZ-765.29207
G2,VX0.00121245,VY0.00028143,VZ0.00139298
G3,XY-0.00001442,XZ0.00090184,YZ-0.00007000
–GT,PN101,SW2113,ST150391000,EW2113,ET150395000
–Valid Readings: 3 of 3
–Fixed Readings: 3 of 3
–Nor Min: 4334252.8668 Max: 4334252.8707
–Eas Min: 477452.0167 Max: 477452.0225
–Elv Min: 228.4019 Max: 228.4049
–Nor Avg: 4334252.8688 SD: 0.0016
–Eas Avg: 477452.0192 SD: 0.0024
–Elv Avg: 228.4029 SD: 0.0014
–NRMS Avg: 0.0467 SD: 0.0047 Min: 0.0400 Max: 0.0500
–ERMS Avg: 0.0300 SD: 0.0000 Min: 0.0300 Max: 0.0300
–HSDV Avg: 0.0555 SD: 0.0039 Min: 0.0500 Max: 0.0583
–VSDV Avg: 0.0800 SD: 0.0000 Min: 0.0800 Max: 0.0800
–HDOP Avg: 1.0000 Min: 1.0000 Max: 1.0000
–VDOP Avg: 2.2450 Min: 1.8680 Max: 2.9990
–PDOP Avg: 2.4663 Min: 2.1188 Max: 3.1613
–Number of Satellites Avg: 9 Min: 9 Max: 9
–HSDV:0.058, VSDV:0.080, STATUS:FIXED, SATS:9, PDOP:2.119, HDOP:1.000, VDOP:1.868, TDOP:1.927, GDOP:0.881, NSDV:0.050, ESDV:0.030
–DT07-06-2020
–TM19:46:53
GPS,PN102,LA39.092628048000,LN8.442072620800,EL230.796333,–
–GS,PN102,N 4334264.9943,E 477457.4921,EL228.1592,–
G0,2020/07/06 17:46:42,(Average) - Base ID read at rover: 0005
G1,BP5,PN102,DX-2057.25680,DY18193.39892,DZ-756.02141
G2,VX0.00279296,VY0.00082259,VZ0.00418787
G3,XY-0.00005340,XZ0.00239864,YZ-0.00021467
–GT,PN102,SW2113,ST150416000,EW2113,ET150419000
–Valid Readings: 3 of 3
–Fixed Readings: 3 of 3
–Nor Min: 4334264.9934 Max: 4334264.9949
–Eas Min: 477457.4908 Max: 477457.4930
–Elv Min: 228.1519 Max: 228.1649
–Nor Avg: 4334264.9943 SD: 0.0007
–Eas Avg: 477457.4921 SD: 0.0009
–Elv Avg: 228.1592 SD: 0.0054
–NRMS Avg: 0.0300 SD: 0.0000 Min: 0.0300 Max: 0.0300
–ERMS Avg: 0.0200 SD: 0.0000 Min: 0.0200 Max: 0.0200
–HSDV Avg: 0.0361 SD: 0.0000 Min: 0.0361 Max: 0.0361
–VSDV Avg: 0.0600 SD: 0.0000 Min: 0.0600 Max: 0.0600
–HDOP Avg: 0.9000 Min: 0.8000 Max: 1.1000
–VDOP Avg: 1.9610 Min: 1.7920 Max: 2.2990
–PDOP Avg: 2.1665 Min: 1.9625 Max: 2.4342
–Number of Satellites Avg: 9 Min: 9 Max: 10
–HSDV:0.036, VSDV:0.060, STATUS:FIXED, SATS:9, PDOP:2.103, HDOP:1.100, VDOP:1.792, TDOP:1.923, GDOP:0.851, NSDV:0.030, ESDV:0.020
–DT07-06-2020
–TM19:47:17
GPS,PN103,LA39.092684560000,LN8.442104845600,EL230.771333,–
–GS,PN103,N 4334282.3926,E 477465.2761,EL228.1342,–
G0,2020/07/06 17:47:08,(Average) - Base ID read at rover: 0005
G1,BP5,PN103,DX-2069.33139,DY18199.36714,DZ-742.52347
G2,VX0.00122299,VY0.00024397,VZ0.00109876
G3,XY0.00001556,XZ0.00080125,YZ-0.00002421
–GT,PN103,SW2113,ST150441000,EW2113,ET150445000
–Valid Readings: 3 of 3
–Fixed Readings: 3 of 3
–Nor Min: 4334282.3908 Max: 4334282.3936
–Eas Min: 477465.2748 Max: 477465.2786
–Elv Min: 228.1299 Max: 228.1379
–Nor Avg: 4334282.3926 SD: 0.0013
–Eas Avg: 477465.2761 SD: 0.0017
–Elv Avg: 228.1342 SD: 0.0033
–NRMS Avg: 0.0200 SD: 0.0000 Min: 0.0200 Max: 0.0200
–ERMS Avg: 0.0200 SD: 0.0000 Min: 0.0200 Max: 0.0200
–HSDV Avg: 0.0283 SD: 0.0000 Min: 0.0283 Max: 0.0283
–VSDV Avg: 0.0500 SD: 0.0000 Min: 0.0500 Max: 0.0500
–HDOP Avg: 0.8000 Min: 0.8000 Max: 0.8000
–VDOP Avg: 1.7920 Min: 1.7920 Max: 1.7920
–PDOP Avg: 1.9625 Min: 1.9625 Max: 1.9625
–Number of Satellites Avg: 10 Min: 10 Max: 10
–HSDV:0.028, VSDV:0.050, STATUS:FIXED, SATS:10, PDOP:1.962, HDOP:0.800, VDOP:1.792, TDOP:1.768, GDOP:0.851, NSDV:0.020, ESDV:0.020
–DT07-06-2020
–TM19:47:43
GPS,PN104,LA39.092710268600,LN8.442072114200,EL230.327667,–
–GS,PN104,N 4334290.3402,E 477457.4434,EL227.6906,–
G0,2020/07/06 17:47:28,(Average) - Base ID read at rover: 0005
G1,BP5,PN104,DX-2073.43602,DY18190.78514,DZ-736.65938
G2,VX0.00102680,VY0.00022462,VZ0.00098058
G3,XY0.00001861,XZ0.00068875,YZ-0.00001579
–GT,PN104,SW2113,ST150461000,EW2113,ET150465000
–Valid Readings: 3 of 3
–Fixed Readings: 3 of 3
–Nor Min: 4334290.3355 Max: 4334290.3440
–Eas Min: 477457.4407 Max: 477457.4469
–Elv Min: 227.6879 Max: 227.6939
–Nor Avg: 4334290.3402 SD: 0.0035
–Eas Avg: 477457.4434 SD: 0.0026
–Elv Avg: 227.6906 SD: 0.0025
–NRMS Avg: 0.0200 SD: 0.0000 Min: 0.0200 Max: 0.0200
–ERMS Avg: 0.0200 SD: 0.0000 Min: 0.0200 Max: 0.0200
–HSDV Avg: 0.0283 SD: 0.0000 Min: 0.0283 Max: 0.0283
–VSDV Avg: 0.0400 SD: 0.0000 Min: 0.0400 Max: 0.0400
–HDOP Avg: 0.8000 Min: 0.8000 Max: 0.8000
–VDOP Avg: 1.7920 Min: 1.7920 Max: 1.7920
–PDOP Avg: 1.9625 Min: 1.9625 Max: 1.9625
–Number of Satellites Avg: 10 Min: 10 Max: 10
–HSDV:0.028, VSDV:0.040, STATUS:FIXED, SATS:10, PDOP:1.962, HDOP:0.800, VDOP:1.792, TDOP:1.768, GDOP:0.851, NSDV:0.020, ESDV:0.020
–DT07-06-2020
–TM19:48:05
GPS,PN105,LA39.092709159400,LN8.442027949200,EL230.201333,–
–GS,PN105,N 4334290.0287,E 477446.8429,EL227.5642,–
G0,2020/07/06 17:47:53,(Average) - Base ID read at rover: 0005
G1,BP5,PN105,DX-2071.69612,DY18180.32506,DZ-737.00486
G2,VX0.00189287,VY0.00054599,VZ0.00183890
G3,XY0.00007503,XZ0.00116460,YZ0.00002215
–GT,PN105,SW2113,ST150487000,EW2113,ET150490000
–Valid Readings: 3 of 3
–Fixed Readings: 3 of 3
–Nor Min: 4334290.0177 Max: 4334290.0379
–Eas Min: 477446.8398 Max: 477446.8467
–Elv Min: 227.5639 Max: 227.5649
–Nor Avg: 4334290.0287 SD: 0.0083
–Eas Avg: 477446.8429 SD: 0.0029
–Elv Avg: 227.5642 SD: 0.0005
–NRMS Avg: 0.0300 SD: 0.0000 Min: 0.0300 Max: 0.0300
–ERMS Avg: 0.0200 SD: 0.0000 Min: 0.0200 Max: 0.0200
–HSDV Avg: 0.0361 SD: 0.0000 Min: 0.0361 Max: 0.0361
–VSDV Avg: 0.0600 SD: 0.0000 Min: 0.0600 Max: 0.0600
–HDOP Avg: 0.8000 Min: 0.8000 Max: 0.8000
–VDOP Avg: 1.7930 Min: 1.7930 Max: 1.7930
–PDOP Avg: 1.9634 Min: 1.9634 Max: 1.9634
–Number of Satellites Avg: 10 Min: 10 Max: 10
–HSDV:0.036, VSDV:0.060, STATUS:FIXED, SATS:10, PDOP:1.963, HDOP:0.800, VDOP:1.793, TDOP:1.769, GDOP:0.851, NSDV:0.030, ESDV:0.020
–DT07-06-2020
–TM19:48:28
GPS,PN106,LA39.092678157400,LN8.441974522600,EL230.000667,–
–GS,PN106,N 4334280.5089,E 477433.9930,EL227.3636,–
G0,2020/07/06 17:48:29,(Average) - Base ID read at rover: 0005
G1,BP5,PN106,DX-2063.93575,DY18168.53895,DZ-744.54268
G2,VX0.00118305,VY0.00025559,VZ0.00117846
G3,XY0.00002640,XZ0.00080880,YZ-0.00001841
–GT,PN106,SW2113,ST150523000,EW2113,ET150526000
–Valid Readings: 3 of 3
–Fixed Readings: 3 of 3
–Nor Min: 4334280.5067 Max: 4334280.5108
–Eas Min: 477433.9873 Max: 477434.0017
–Elv Min: 227.3609 Max: 227.3659
–Nor Avg: 4334280.5089 SD: 0.0017
–Eas Avg: 477433.9930 SD: 0.0062
–Elv Avg: 227.3636 SD: 0.0021
–NRMS Avg: 0.0200 SD: 0.0000 Min: 0.0200 Max: 0.0200
–ERMS Avg: 0.0200 SD: 0.0000 Min: 0.0200 Max: 0.0200
–HSDV Avg: 0.0283 SD: 0.0000 Min: 0.0283 Max: 0.0283
–VSDV Avg: 0.0433 SD: 0.0047 Min: 0.0400 Max: 0.0500
–HDOP Avg: 0.8000 Min: 0.8000 Max: 0.8000
–VDOP Avg: 1.7930 Min: 1.7930 Max: 1.7930
–PDOP Avg: 1.9634 Min: 1.9634 Max: 1.9634
–Number of Satellites Avg: 10 Min: 10 Max: 10
–HSDV:0.028, VSDV:0.040, STATUS:FIXED, SATS:10, PDOP:1.963, HDOP:0.800, VDOP:1.793, TDOP:1.769, GDOP:0.851, NSDV:0.020, ESDV:0.020
–DT07-06-2020
–TM19:49:04
GPS,PN107,LA39.092643717400,LN8.441944028200,EL230.018000,–
–GS,PN107,N 4334269.9134,E 477426.6438,EL227.3809,–
G0,2020/07/06 17:48:56,(Average) - Base ID read at rover: 0005
G1,BP5,PN107,DX-2056.18838,DY18162.33558,DZ-752.76321
G2,VX0.00187949,VY0.00054138,VZ0.00184801
G3,XY0.00007939,XZ0.00115573,YZ0.00002363
–GT,PN107,SW2113,ST150547000,EW2113,ET150553000
–Valid Readings: 3 of 3
–Fixed Readings: 3 of 3
–Nor Min: 4334269.9107 Max: 4334269.9183
–Eas Min: 477426.6402 Max: 477426.6495
–Elv Min: 227.3769 Max: 227.3839
–Nor Avg: 4334269.9134 SD: 0.0034
–Eas Avg: 477426.6438 SD: 0.0040
–Elv Avg: 227.3809 SD: 0.0029
–NRMS Avg: 0.0300 SD: 0.0000 Min: 0.0300 Max: 0.0300
–ERMS Avg: 0.0200 SD: 0.0000 Min: 0.0200 Max: 0.0200
–HSDV Avg: 0.0361 SD: 0.0000 Min: 0.0361 Max: 0.0361
–VSDV Avg: 0.0600 SD: 0.0000 Min: 0.0600 Max: 0.0600
–HDOP Avg: 0.8000 Min: 0.8000 Max: 0.8000
–VDOP Avg: 1.7930 Min: 1.7930 Max: 1.7930
–PDOP Avg: 1.9634 Min: 1.9634 Max: 1.9634
–Number of Satellites Avg: 10 Min: 10 Max: 10
–HSDV:0.036, VSDV:0.060, STATUS:FIXED, SATS:10, PDOP:1.963, HDOP:0.800, VDOP:1.793, TDOP:1.769, GDOP:0.851, NSDV:0.030, ESDV:0.020
–DT07-06-2020
–TM19:49:31
GPS,PN108,LA39.092644579400,LN8.442001021600,EL230.309333,–
–GS,PN108,N 4334270.1398,E 477440.3230,EL227.6722,–
G0,2020/07/06 17:49:23,(Average) - Base ID read at rover: 0005
G1,BP5,PN108,DX-2058.20275,DY18175.85899,DZ-752.37627
G2,VX0.00173755,VY0.00052518,VZ0.00180288
G3,XY0.00007380,XZ0.00109282,YZ0.00002390
–GT,PN108,SW2113,ST150576000,EW2113,ET150580000
–Valid Readings: 3 of 3
–Fixed Readings: 3 of 3
–Nor Min: 4334270.1380 Max: 4334270.1415
–Eas Min: 477440.3192 Max: 477440.3275
–Elv Min: 227.6699 Max: 227.6739
–Nor Avg: 4334270.1398 SD: 0.0014
–Eas Avg: 477440.3230 SD: 0.0034
–Elv Avg: 227.6722 SD: 0.0017
–NRMS Avg: 0.0300 SD: 0.0000 Min: 0.0300 Max: 0.0300
–ERMS Avg: 0.0300 SD: 0.0000 Min: 0.0300 Max: 0.0300
–HSDV Avg: 0.0424 SD: 0.0000 Min: 0.0424 Max: 0.0424
–VSDV Avg: 0.0600 SD: 0.0000 Min: 0.0600 Max: 0.0600
–HDOP Avg: 0.8000 Min: 0.8000 Max: 0.8000
–VDOP Avg: 1.7930 Min: 1.7930 Max: 1.7930
–PDOP Avg: 1.9634 Min: 1.9634 Max: 1.9634
–Number of Satellites Avg: 10 Min: 10 Max: 10
–HSDV:0.042, VSDV:0.060, STATUS:FIXED, SATS:10, PDOP:1.963, HDOP:0.800, VDOP:1.793, TDOP:1.769, GDOP:0.851, NSDV:0.030, ESDV:0.030
–DT07-06-2020
–TM19:49:58