Ciao Fausto.
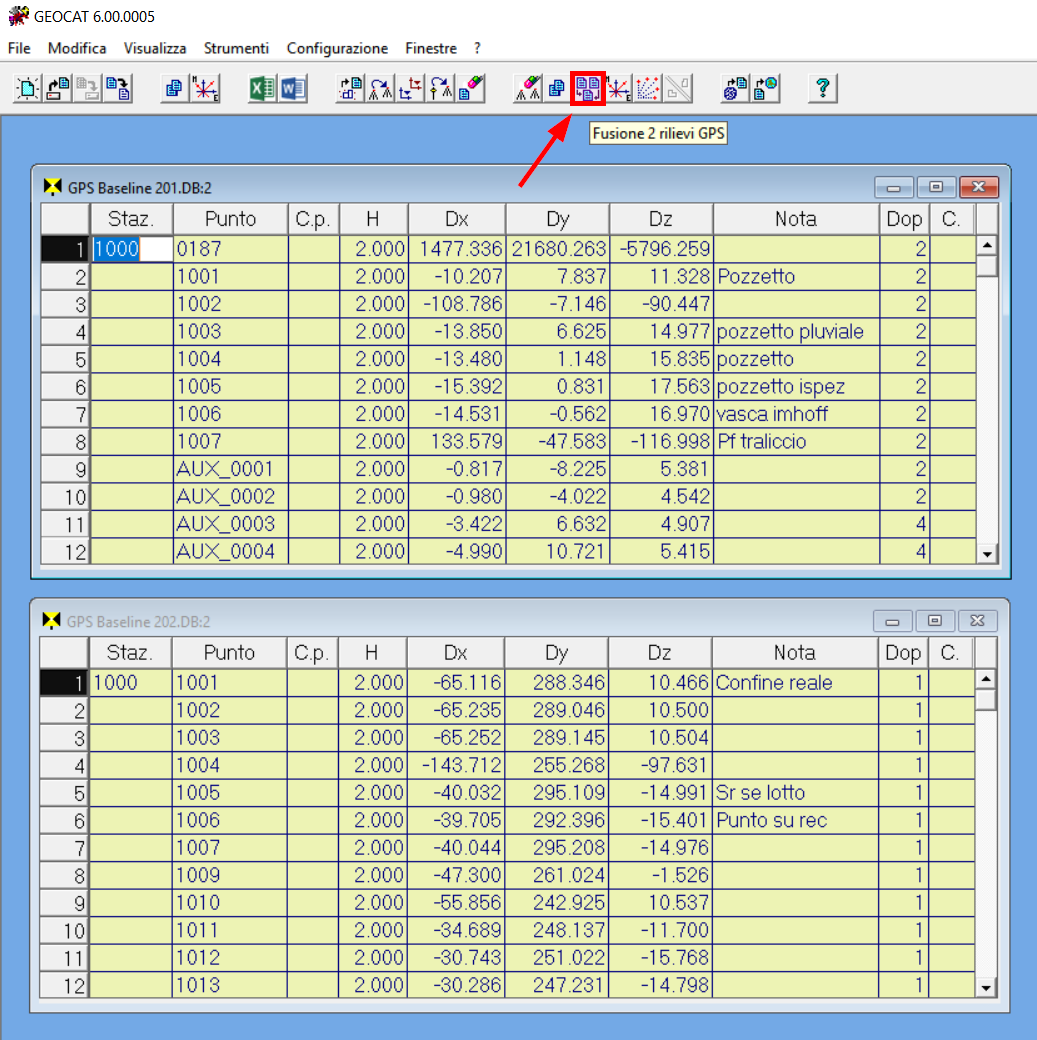
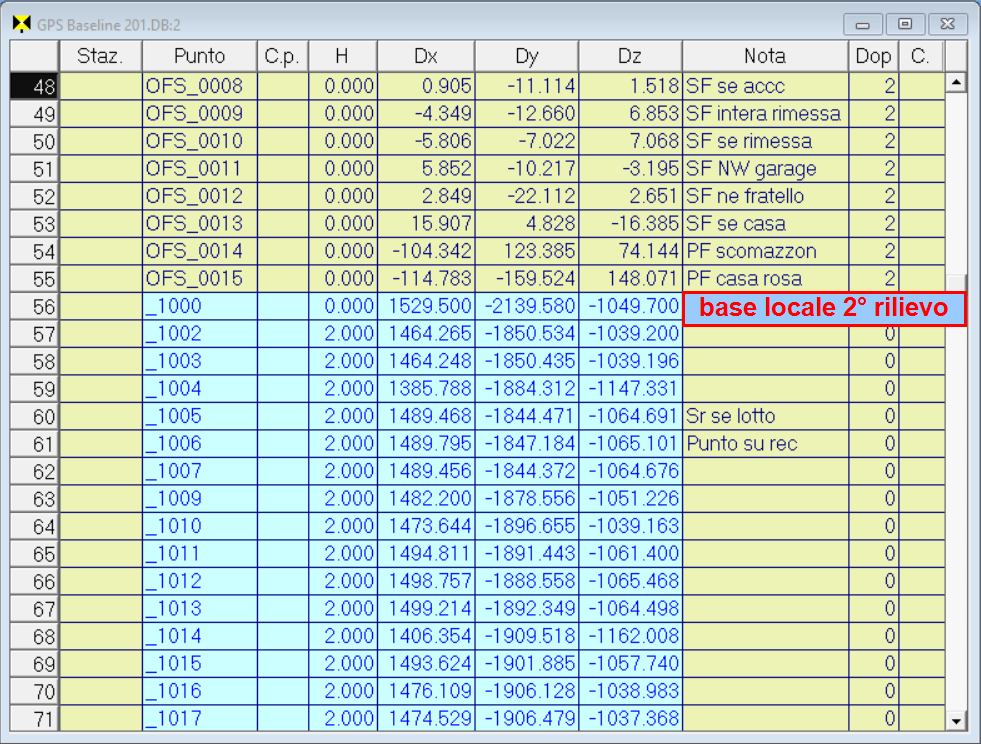
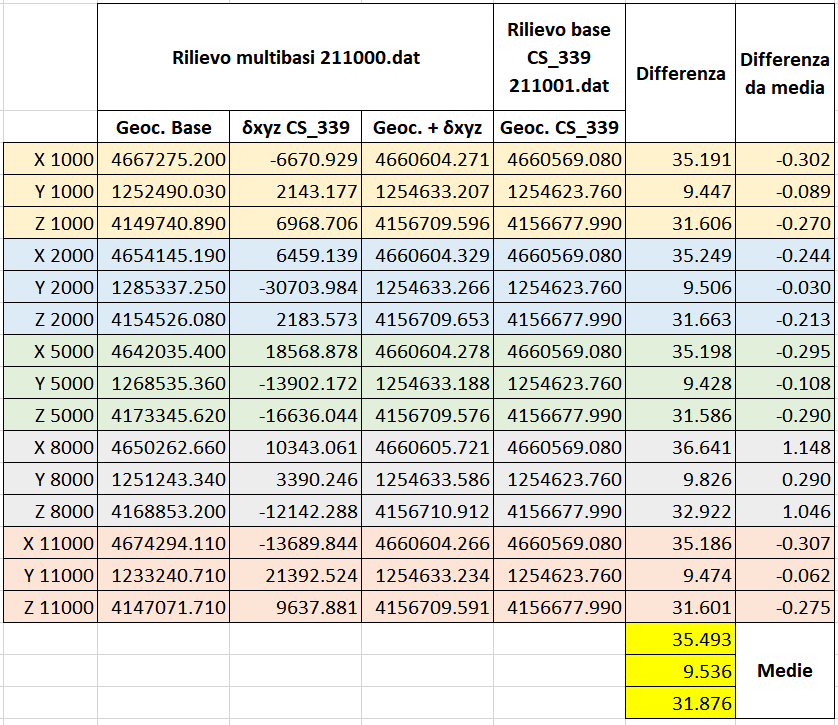
Esatto, i due rilievi erano entrambi appoggiati alla base distante (Castelfranco) e per ciascuno è stata generata la VRS chiamata 1000 per entrambi i rilievi.
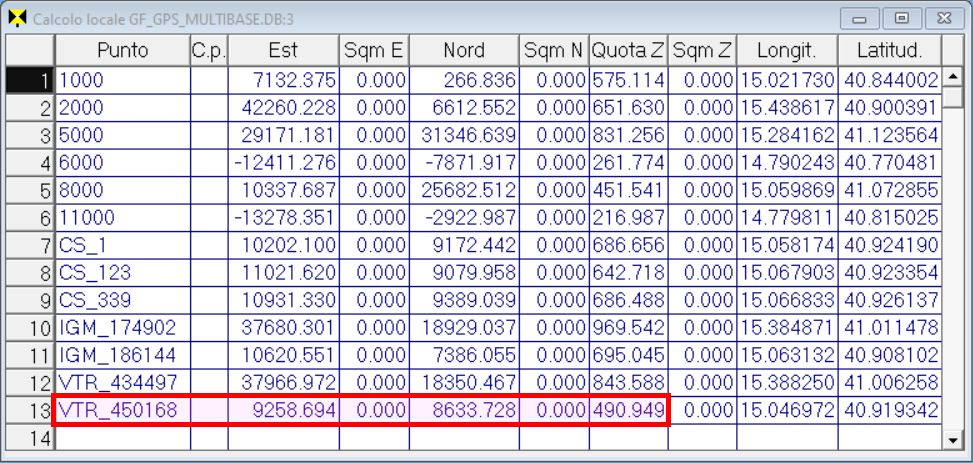
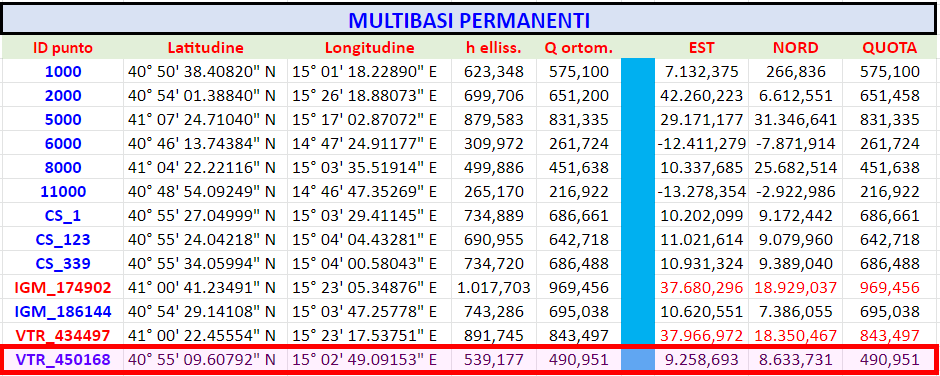
Non avevo capito che volevi fare un raffronto tra i due rilievi lasciati sulla base permanente e gli stessi rilievi riferiti alla VRS locale. Vedo se riesco a recuperare i rilievi originari riferiti alla base permanente e,se così, li pubblico unitamente al confronto tra i due calcoli.
Stai comunque certo che le differenze esistono perché …
-
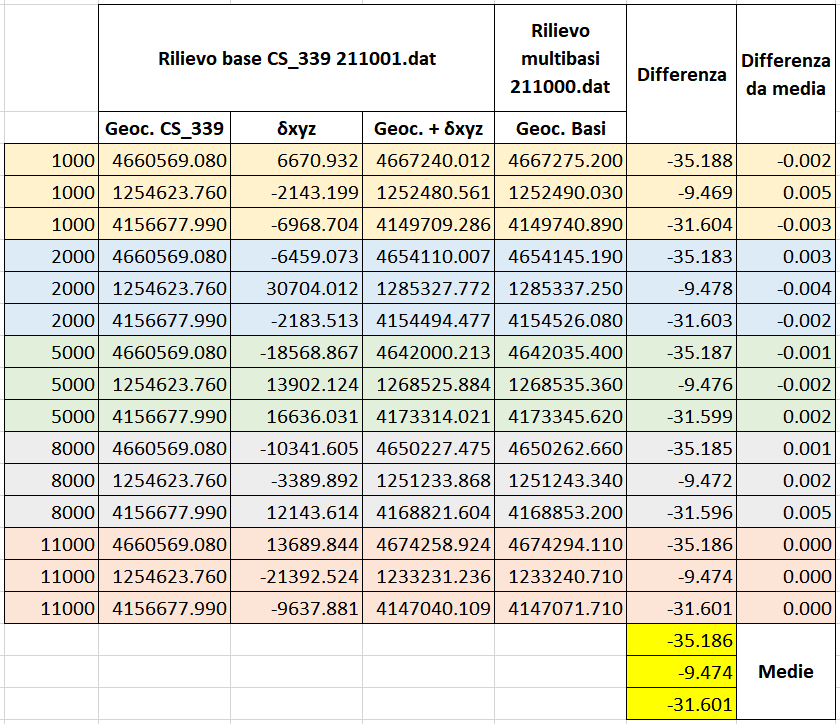
il trasporto in locale della base virtuale è privo di errori in quanto viene svolto in coordinate geocentriche, e con tutte le correzioni che elabora il sistema NRTK, in pratica è come se tu avessi svolto un rilievo base-rover con la base posta sulla VRS calcolata dal sistema, mentre invece …
-
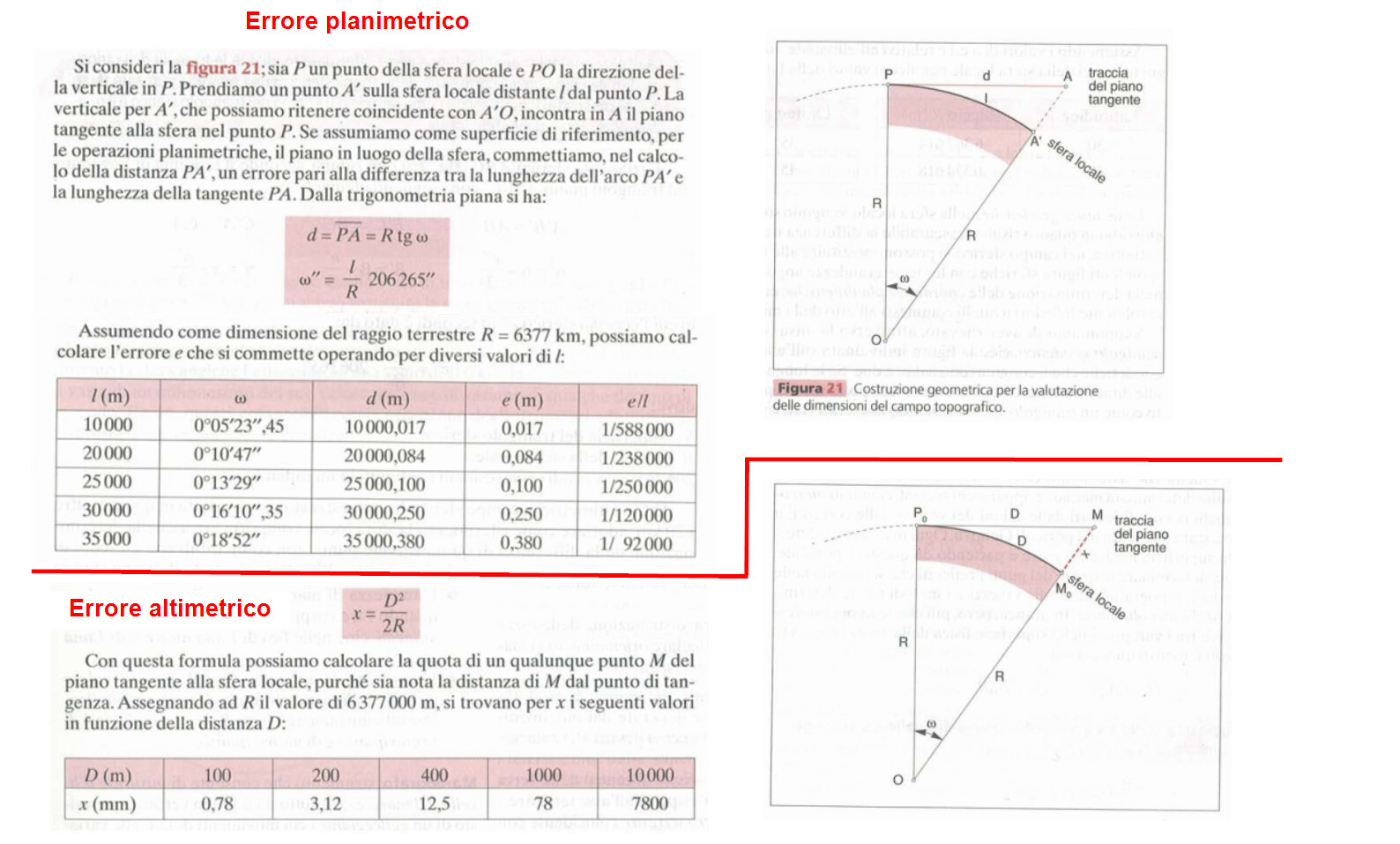
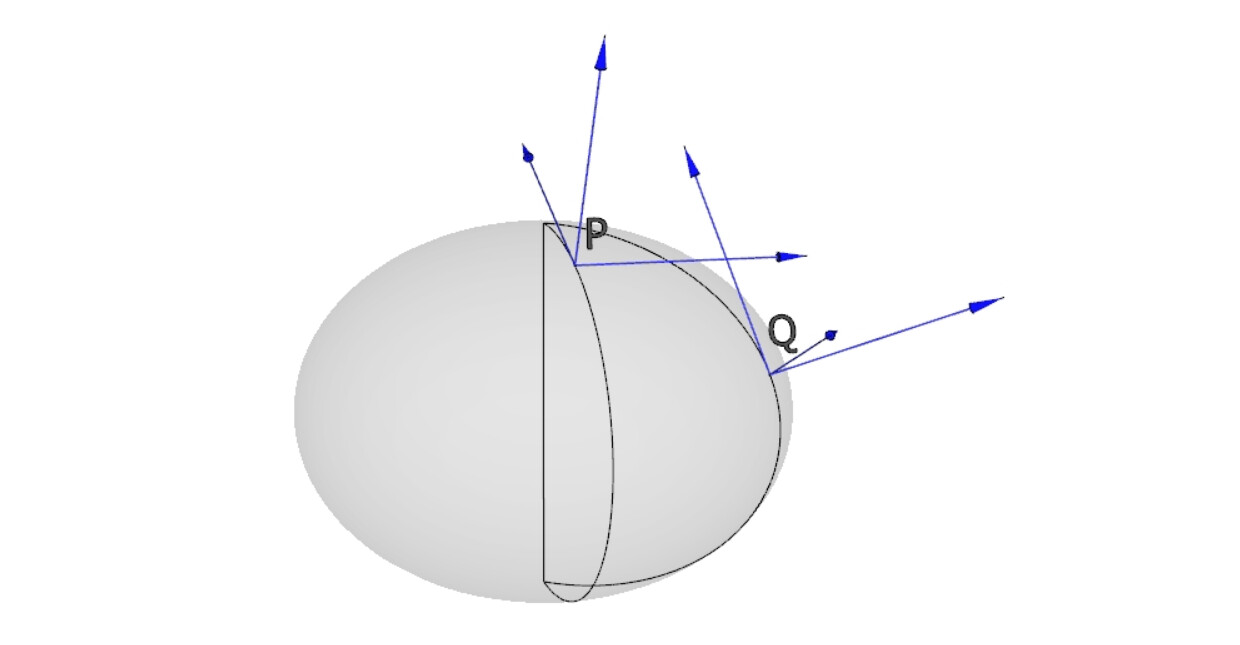
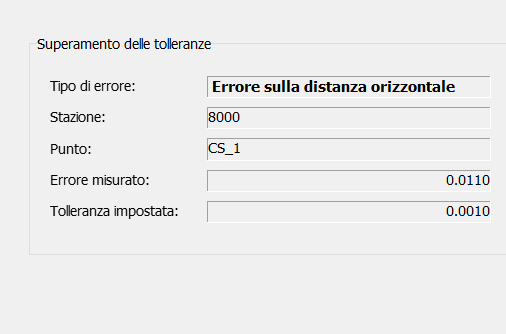
lasciare la base distante comporta sempre l’errore di sfericità che ho descritto in un post sopra perché esci dal campo topografico.
Poi può essere che le differenze siano accettabili o trascurabili ma, come dicevo, lasciare la base a quelle distanze è comunque concettualmente sbagliato e può essere potenzialmente causa di errori anche significativi.
Poi riprendo questo tuo passaggio nel tuo post precedente
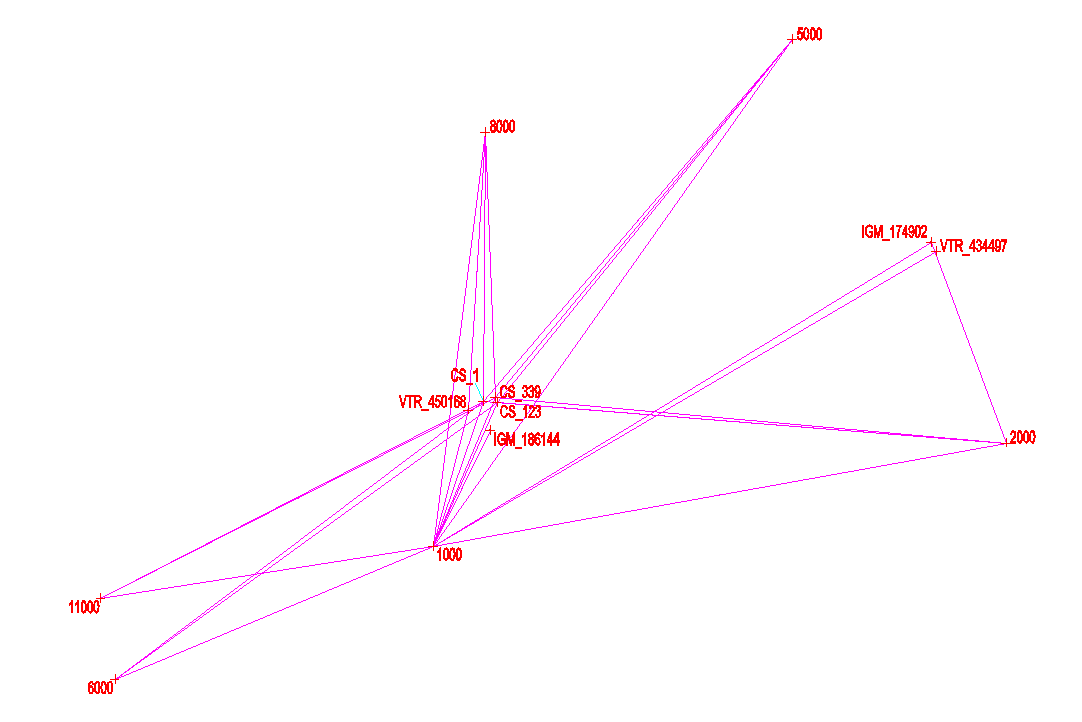
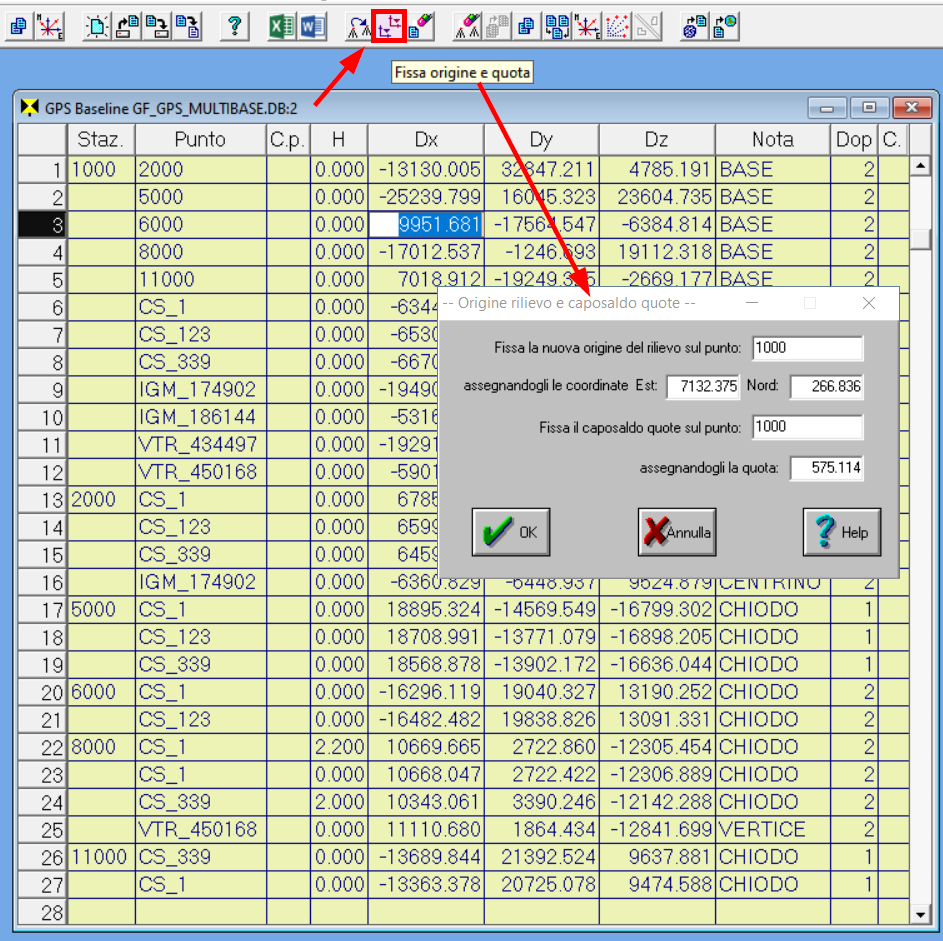
Sono andato a riguardarmi quel tuo mega-rilievo dato dall’unione di tanti rilievi. È vero che tu hai creato la base B1000 riportando su questa le altre basi permanenti, ma questa base B1000 dista comunque circa 10 km dal baricentro del mega-rilievo e 15 km dai punti più distanti.
Ora è assodato che fino a 15 km l’errore planimetrico è trascurabile (vedi le tabelle postate sia da me che Roberto nei post sopra), ma io contesto l’errore concettuale di trasformare rilievi molto localizzati, come quelli che si fanno normalmente per lavori catastali e di riconfinazione, in mega-rilievi che sono al limite del campo topografico.
Capisco l’esigenza di sfruttare i PF o altri punti già battuti, ma dato che questa opportunità si ha già semplicemente unendo due rilievi limitrofi (come quelli che ho postato io), non capisco l’esigenza di unire rilievi che stanno a 10 km l’uno dall’altro, come nel tuo caso.
A meno che tu non voglia crearti una tua cartografia personale della zona in cui operi, ma in quel caso diventa una questione di geodesia e non può essere gestita solo con gli usuali criteri topografici.
Naturalmente non prendere queste mie note come un “insegnamento”, si tratta solo della mia opinione personale condizionata dal “perfezionismo topografico” di cui sono affetto. ![]()