Ciao a tutti.
Quelli di voi che utilizzano il mio software Geocat sapranno che, con gli aggiornamenti dei mesi scorsi e fino al n. 106 del 23/08/2020, ho completato il nuovo motore di calcolo del programma. Si tratta di un potenziamento importante perché, oltre ad ottimizzare il calcolo preesistente, la nuova versione permette di realizzare Rilievi a schema libero, vale a dire rilievi che possono essere sviluppati con la massima libertà di azione, senza cioè essere vincolati a stazionare o rilevare punti prefissati, né dover rispettare alcuna sequenza nelle operazioni di campagna. In diverse condizioni di rilievo questa nuova prestazione di Geocat può consentire un significativo risparmio di tempo delle operazioni in campo.
Desidero quindi illustrarvi il nuovo motore di calcolo mediante un apposito webinar, ovviamente gratuito ed aperto a tutti quelli che ne siano interessati, da tenersi non appena riceverò l’adesione di alcuni di voi che conosco personalmente (gli ho inviato una mail privata) e che si dichiarino disponibili a testarlo durante i loro prossimi rilievi.
Se leggete questo post e siete interessati a partecipare al webinar, rispondete qui.
L’obbiettivo del test che chiederò di svolgere ai colleghi è il seguente:
-
sviluppare un rilievo applicando sia gli schemi classici (vedi sotto), sia gli schemi liberi previsti da Geocat per verificare, dalla doppia restituzione, le differenze sui risultati;
-
qualora tali differenze siano contenute entro i valori di tolleranza previsti per il lavoro svolto (come a me risulta a seguito di alcune prime prove), sarà mia cura sviluppare una procedura che permetta di trasformare il rilievo a schema libero in un rilievo a schema classico in modo da poterlo comunque utilizzare ai fini catastali (Pregeo). Tale procedura sarà sviluppata direttamente su Google Earth in modo da avere l’esatta percezione dell’area rilevata e dei possibili collegamenti tra stazioni.
I nuovi schemi vanno ad aggiungersi ai seguenti schemi tradizionali:
-
aggancio GPS-TS facendo stazione su un punto GPS e osservando un altro (o più) punti GPS di orientamento;
-
legame tra stazioni TS consecutive osservate in andata e ritorno;
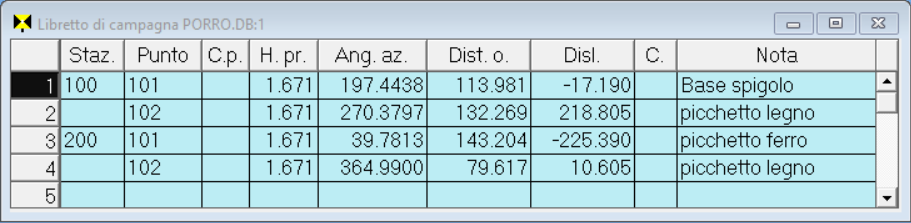
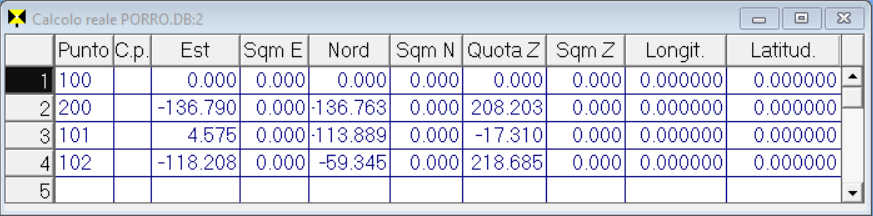
Di seguito descrivo i nuovi schemi liberi, per ognuno riporto un esempio volutamente semplificato, illustrato dallo schema grafico con indicate in blu le misurazioni eseguite, oltre alle tabelle di Geocat compilate con i rispettivi dati e i risultati del calcolo.
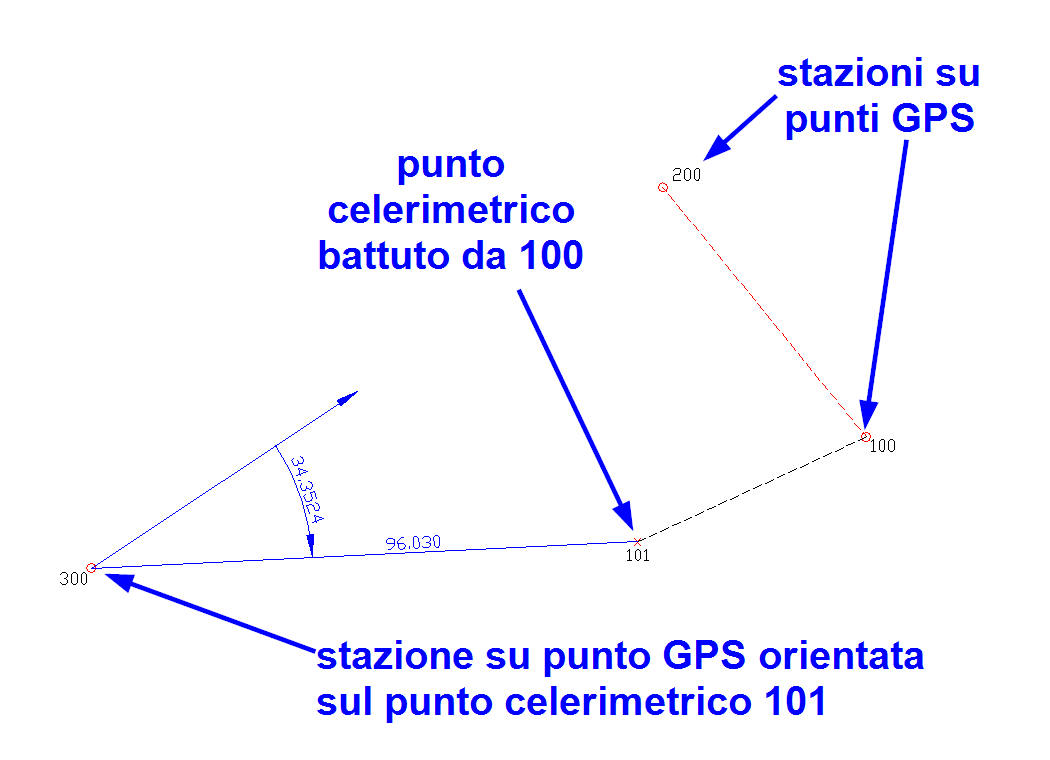
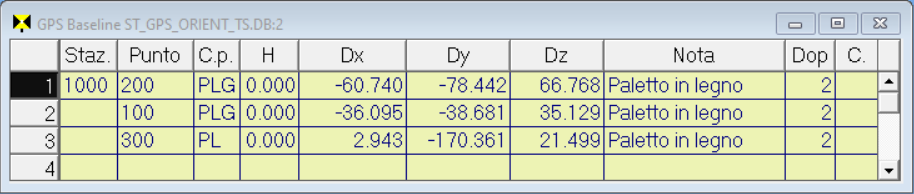
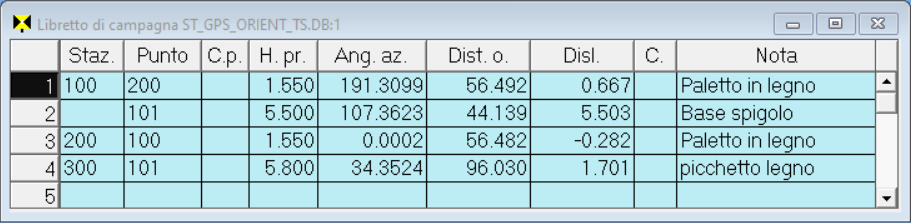
(1) - Stazione su un punto GPS e orientamento su punti celerimetrici determinati da altre stazioni
Questo schema è lo stesso dell’aggancio GPS-TS degli schemi tradizionali di cui sopra con la differenza che permette di orientare la stazione (fatta su un punto GPS), anziché su soli punti GPS, anche su punti celerimetrici rilevati da altre stazioni già agganciate all’ossatura GPS:

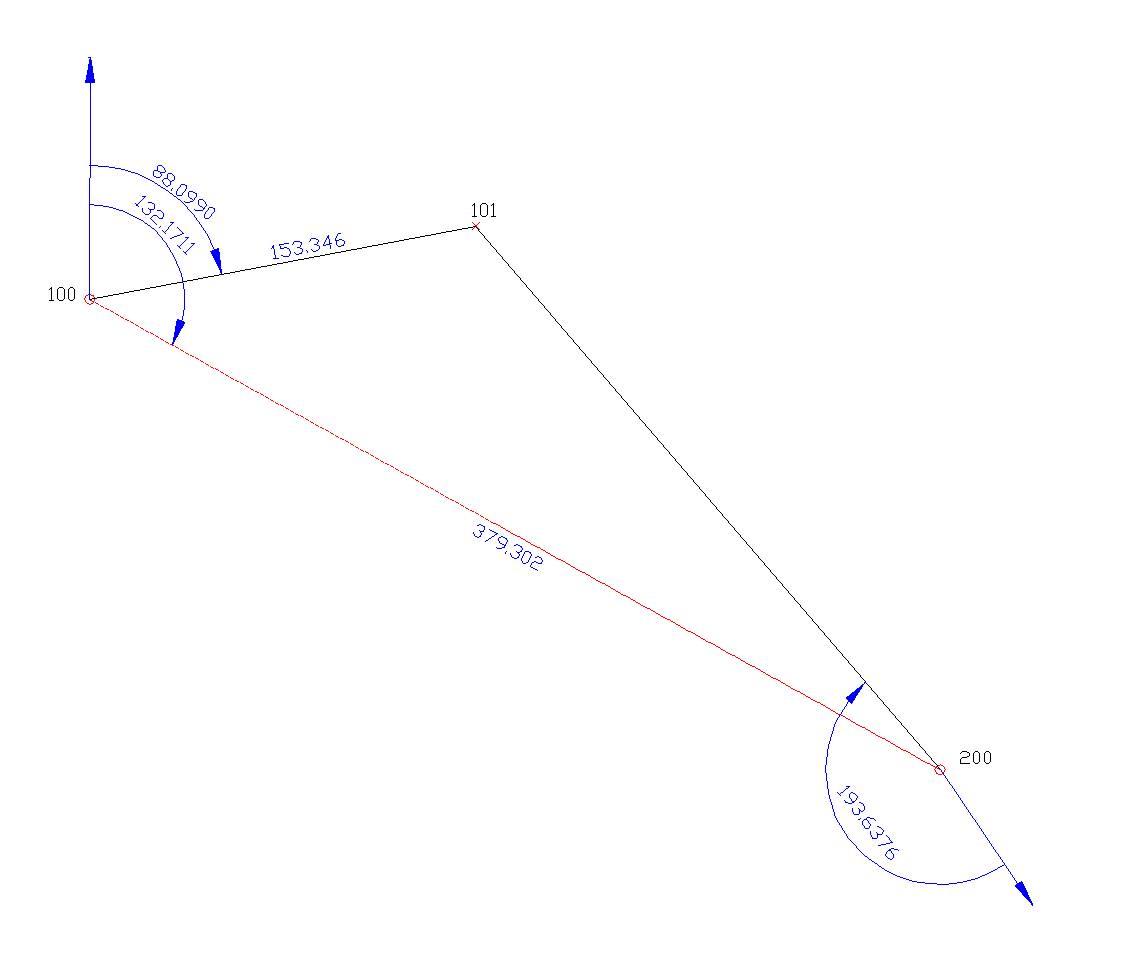
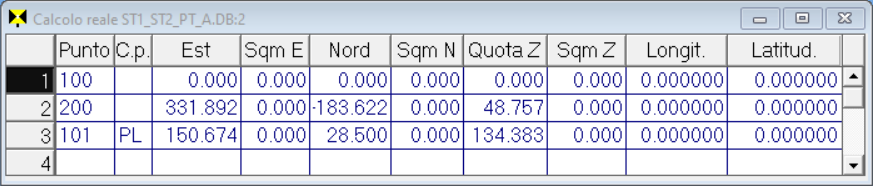
(2) - Metodo Porro - Stazione libera che osserva per angolo e distanza due o più punti GPS o determinati da altre stazioni
Questo schema si presta sia all’aggancio di una stazione al rilievo GPS senza dover necessariamente stazionare su un punto GPS, sia ad applicare il Metodo Porro per legare una stazione ad altre stazioni non visibili.
Nel primo caso, lo schema è il seguente:
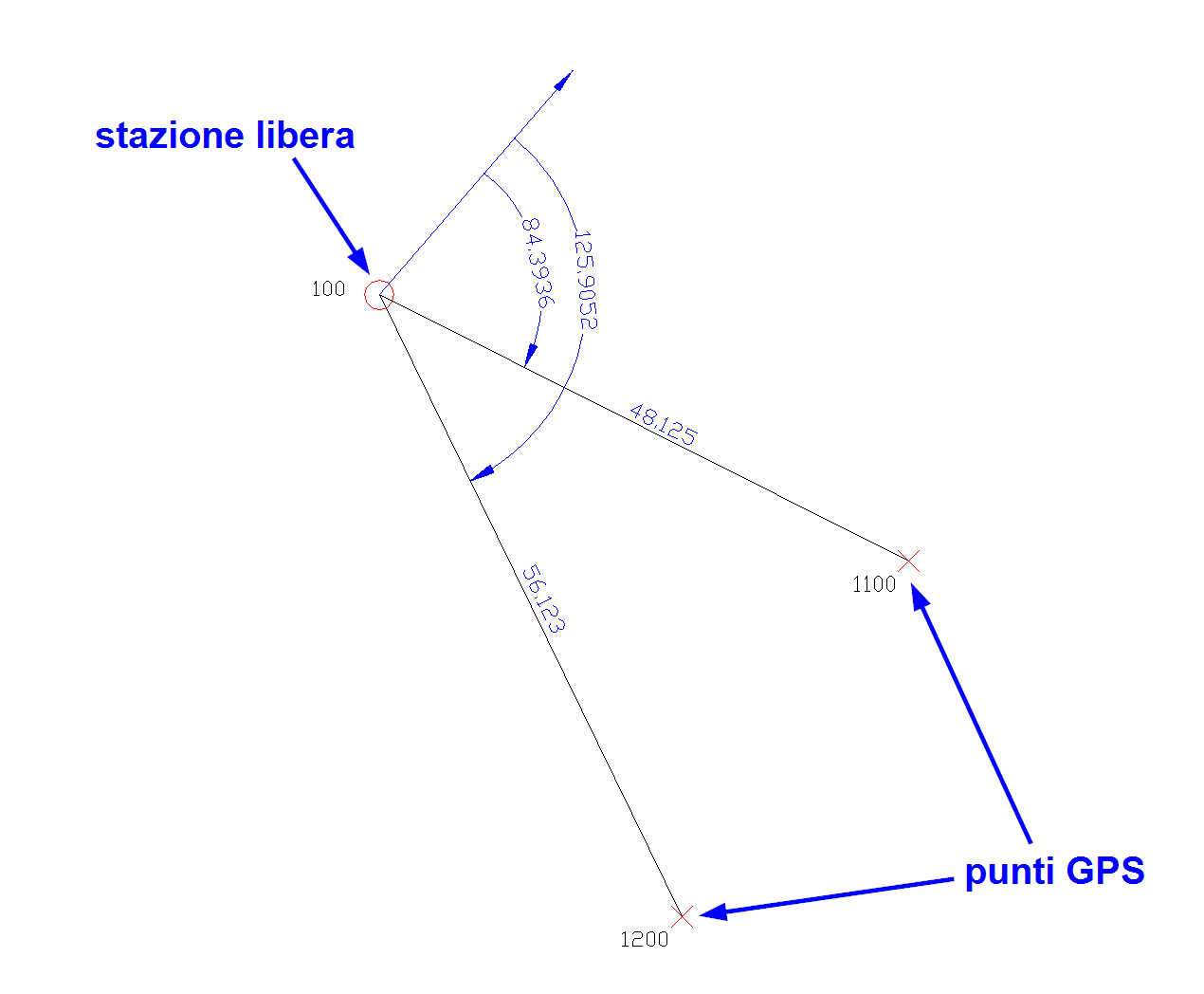



Questo è invece lo schema del Metodo Porro:
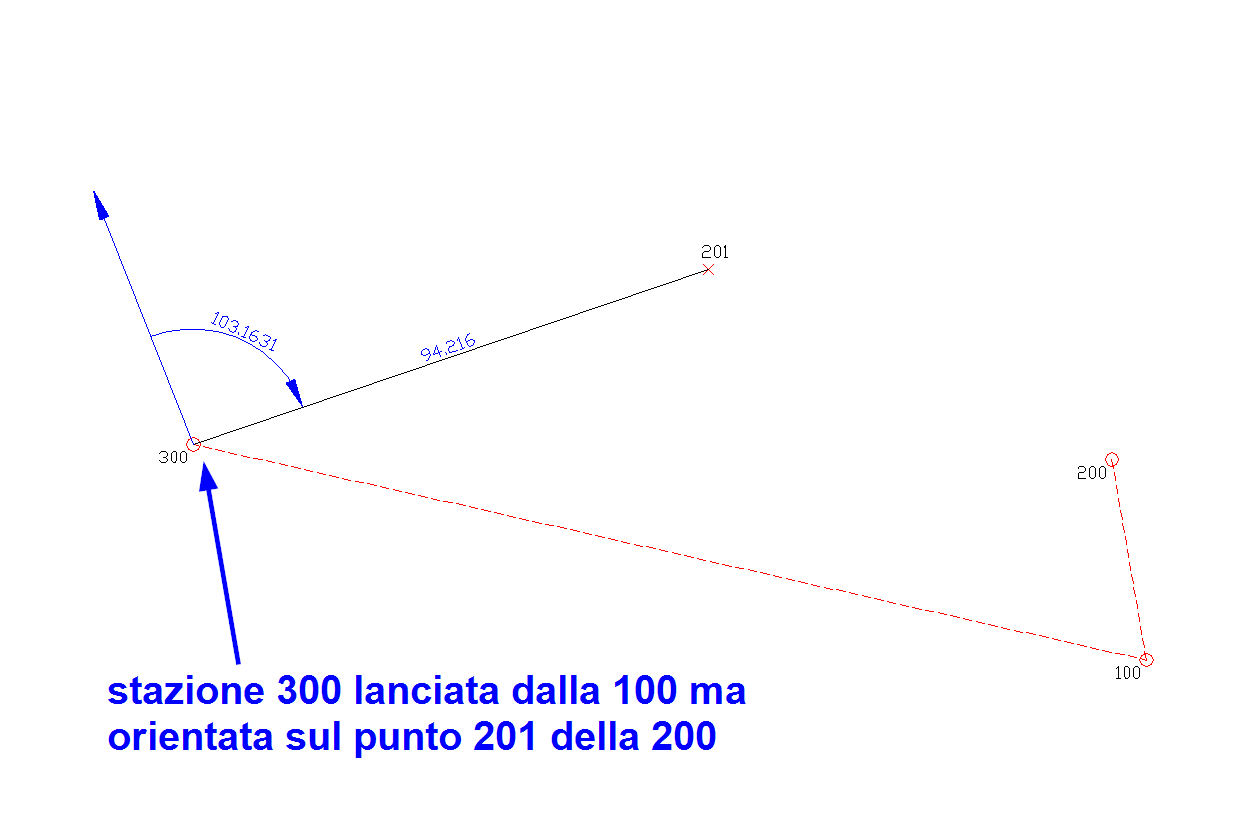
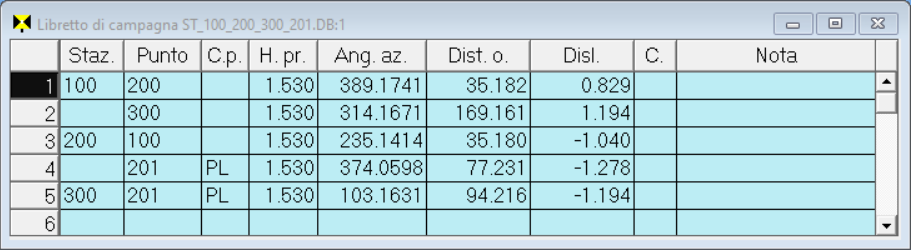
(3) - Stazione lanciata da altre stazioni e orientata su un loro punto celerimetrico
Questo schema può essere utile quando da una stazione precedentemente lanciata da un’altra stazione diventa più comodo, anziché ribattere la stazione lanciante, osservare un punto celerimetrico rilevato dalle stazioni precedenti:

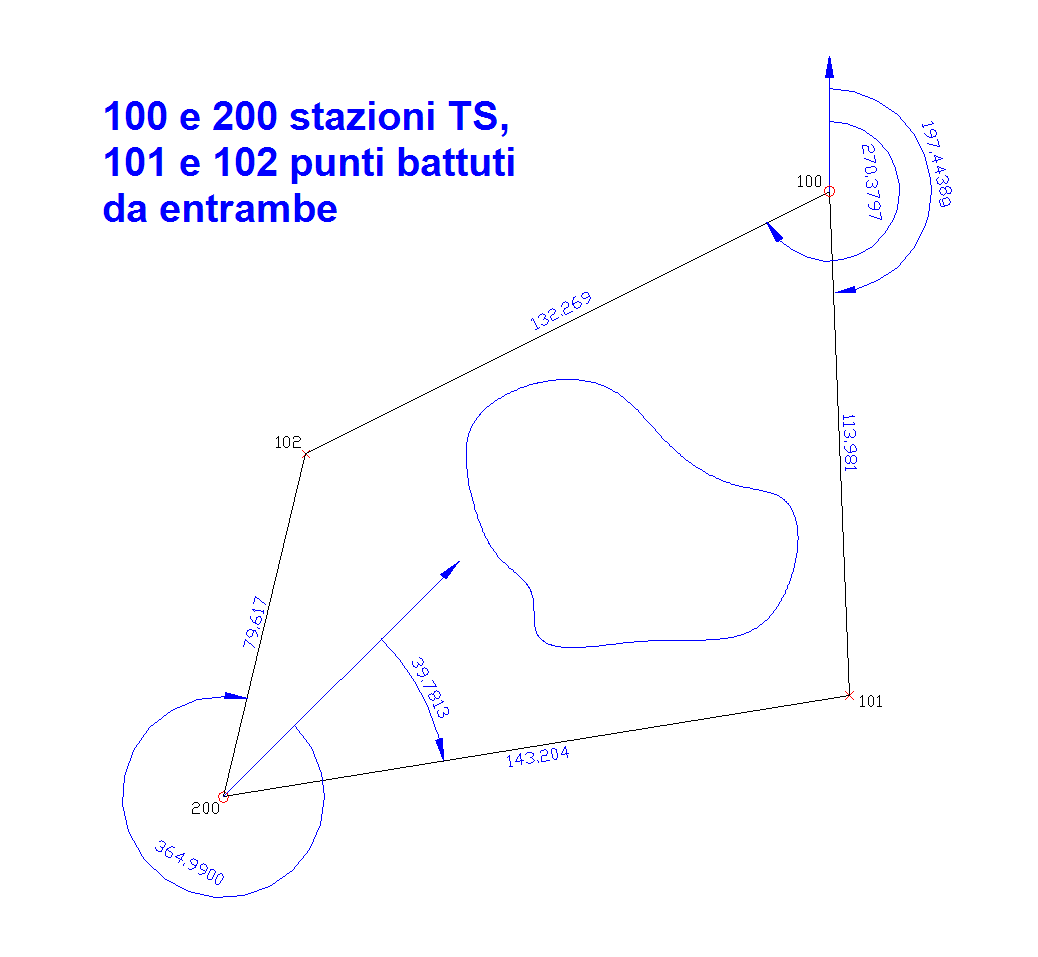
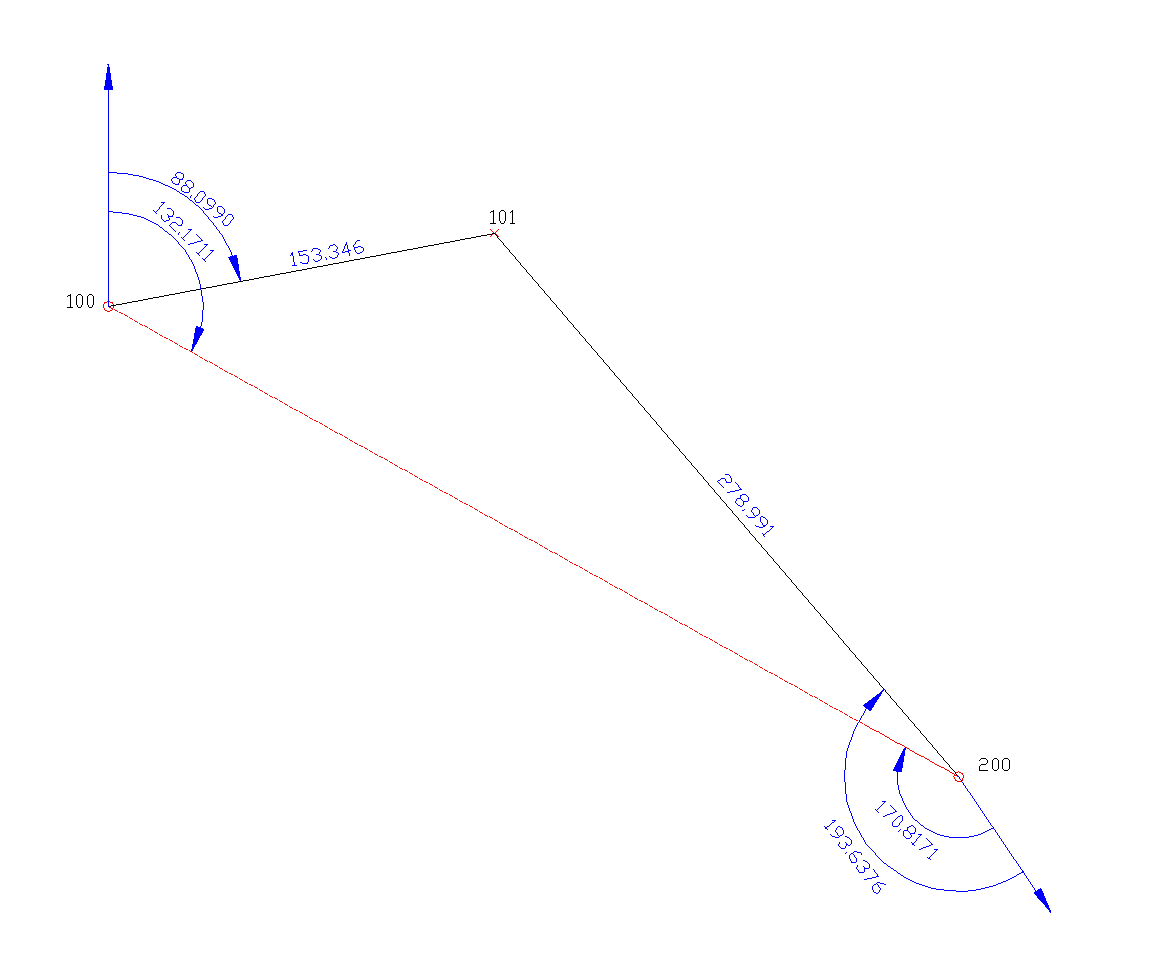
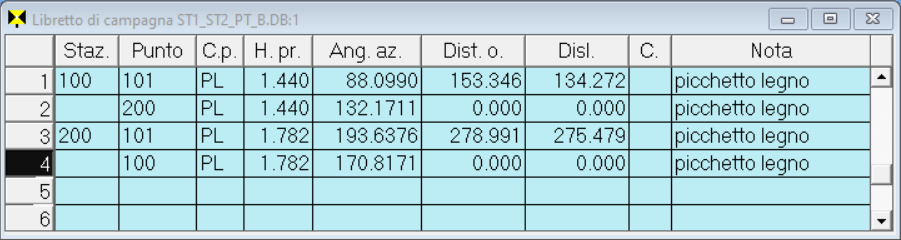
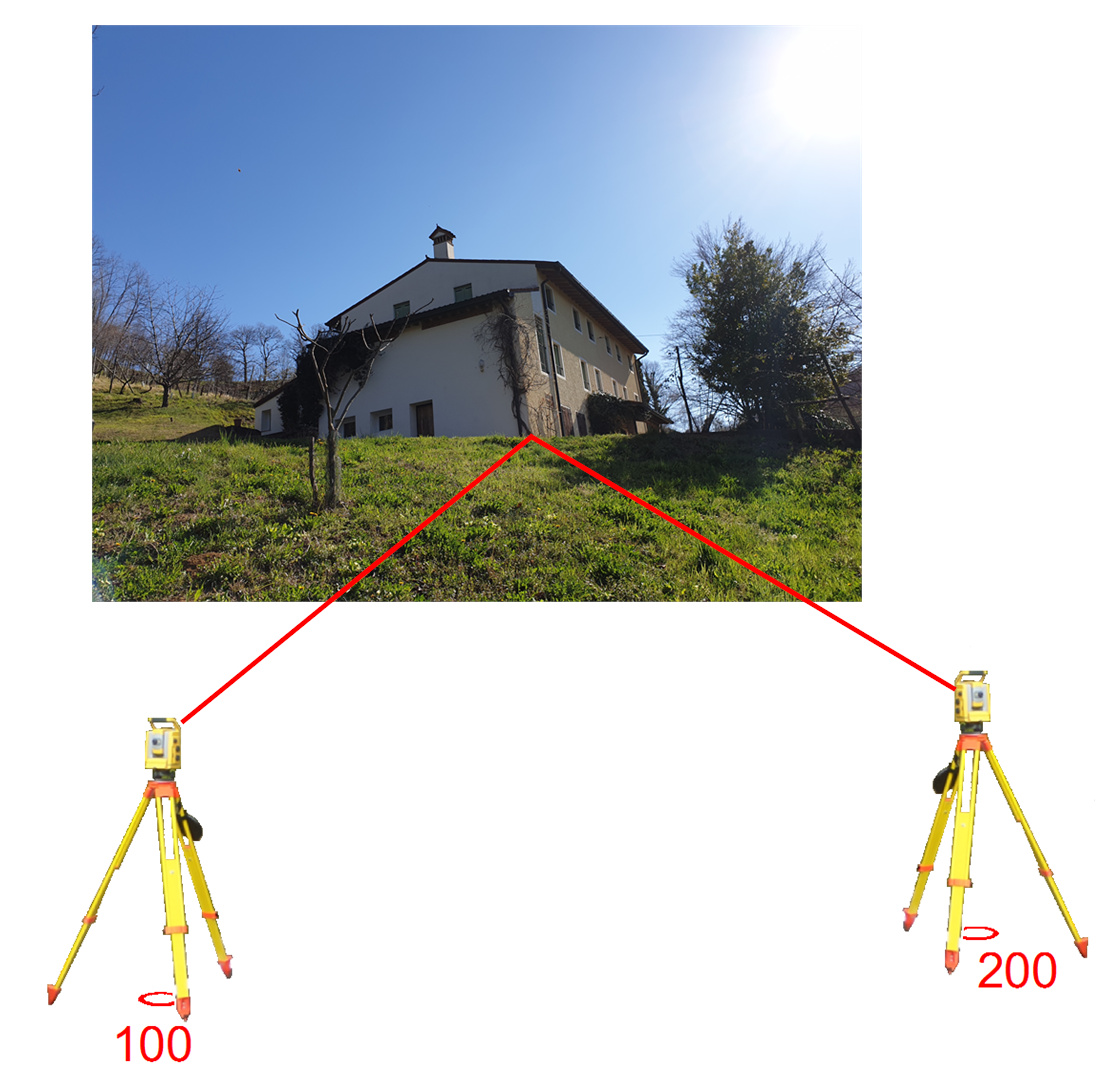
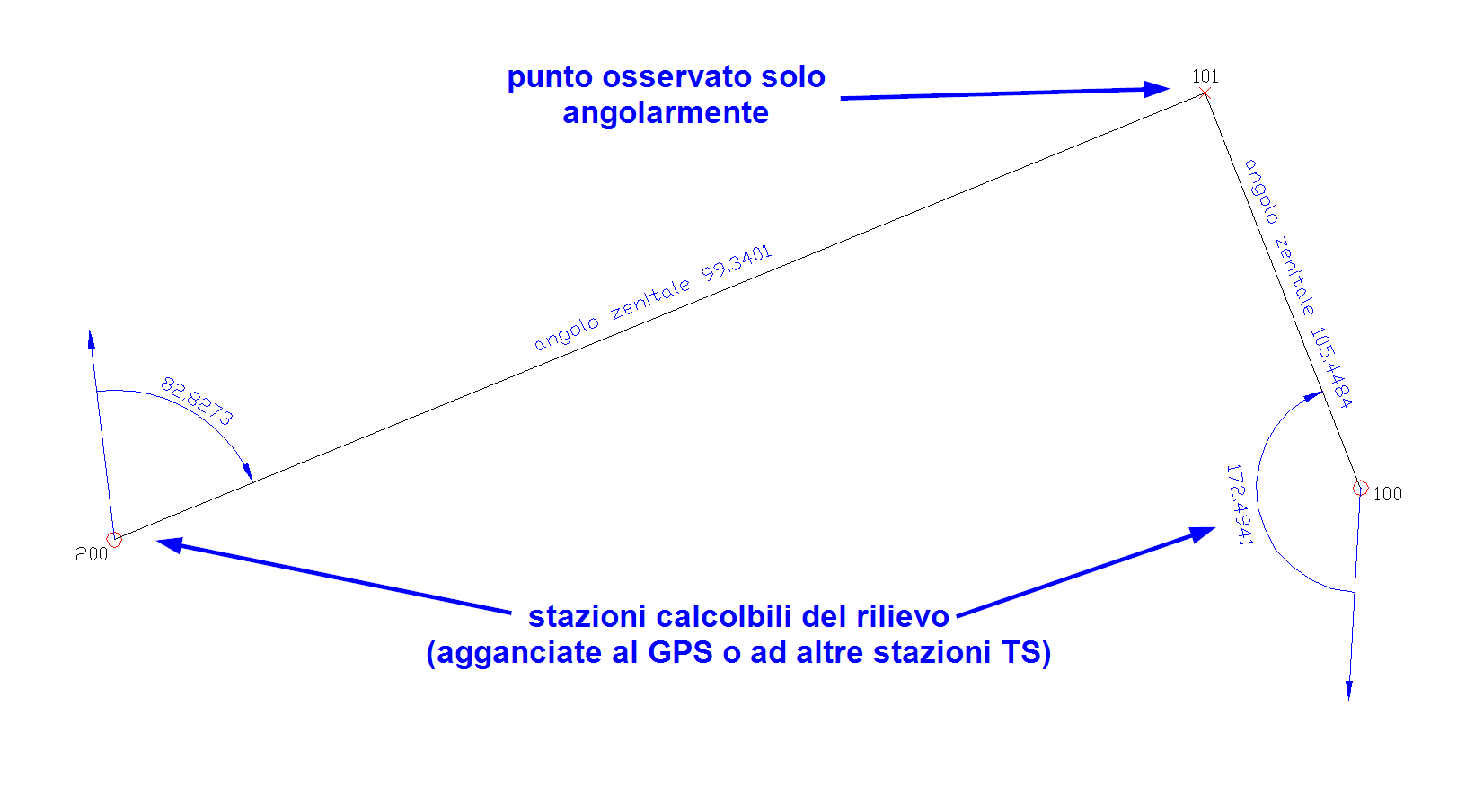
(4) - Due stazioni che non si osservano reciprocamente ma che osservano un punto in comune
Caso A)
La stazione 100 rileva per angolo e distanza sia la stazione 200 che il punto comune 101, mentre la stazione 200 osserva solo l’angolo al punto 101:

Caso B)
Le due stazioni si osservano solo angolarmente ma rilevano per angolo e distanza il punto in comune:
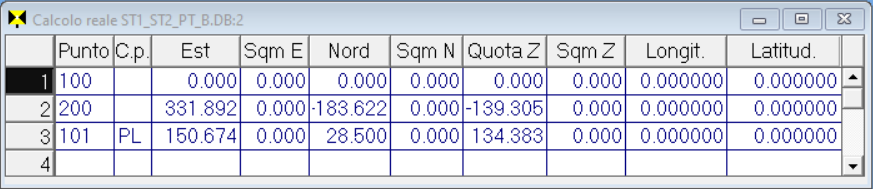
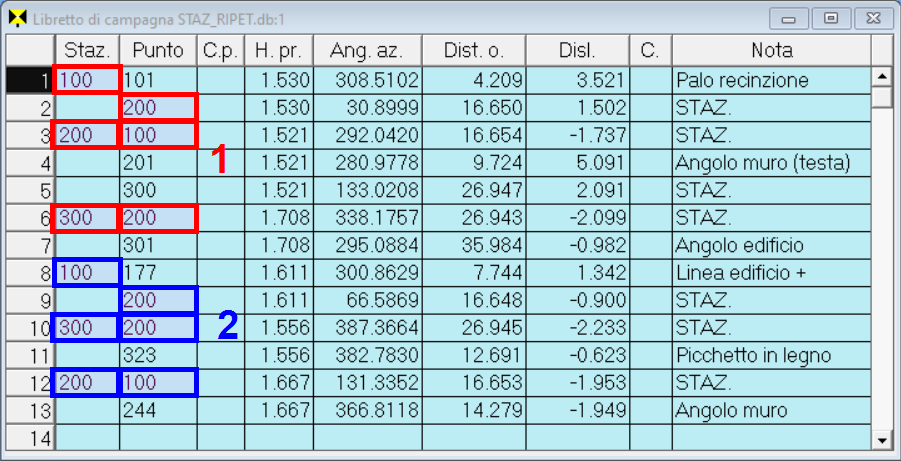
(5) - Stazioni ripetute più volte ma orientate su un punto comune
È il caso classico dei rilievi eseguiti in più sessioni di campagna quando si rende necessario ristazionare sulle stesse stazioni della sessione precedente. Le stazioni possono essere ripetute un numero indefinito di volte purché ovviamente per ciascuna occorrenza si sia osservato l’angolo orizzontale su un punto rilevato anche da una delle occorrenze precedenti:

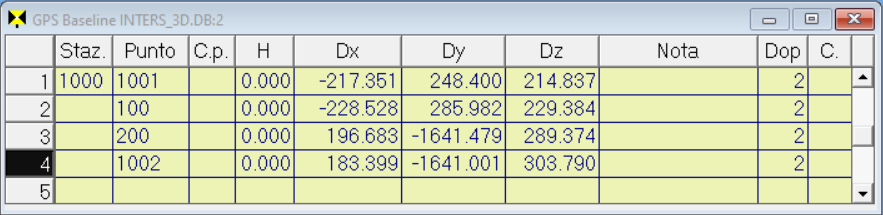
(6) - Intersezioni 3D, punti rilevati solo angolarmente da due stazioni anche non battute reciprocamente
Questo schema permette di rilevare sia planimetricamente che altimetricamente un punto inaccessibile mediante le sole letture angolari da due stazioni anche senza che le stesse si osservino reciprocamente, purché siano determinabili dal resto del rilievo. L’algoritmo risolutivo trova l’intersezione nello spazio delle due rette 3D dei raggi di mira di ciascuna osservazione. Va da sé che per avere la quota esatta del punto a terra andrà come al solito stimata l’altezza del punto collimato.
Nell’esempio che segue le stazioni 100 e 200 sono state fatte su punti GPS e orientate su altrettanti punti GPS (1001 e 1002). Come detto, tuttavia, potrebbero essere due stazioni comunque calcolabili anche da un rilievo TS.

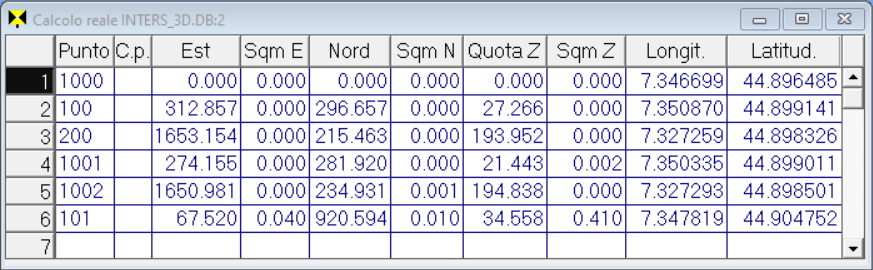
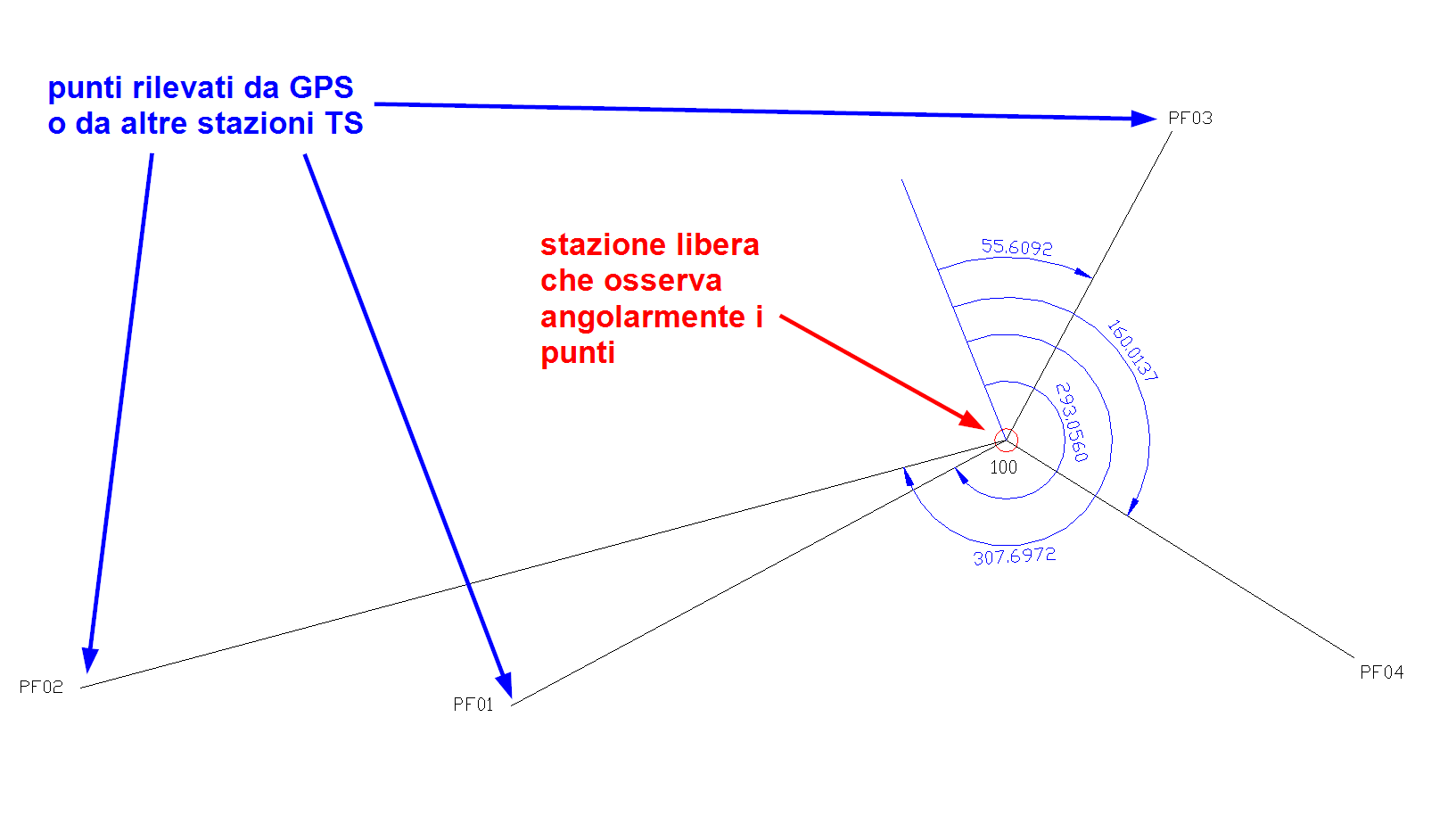
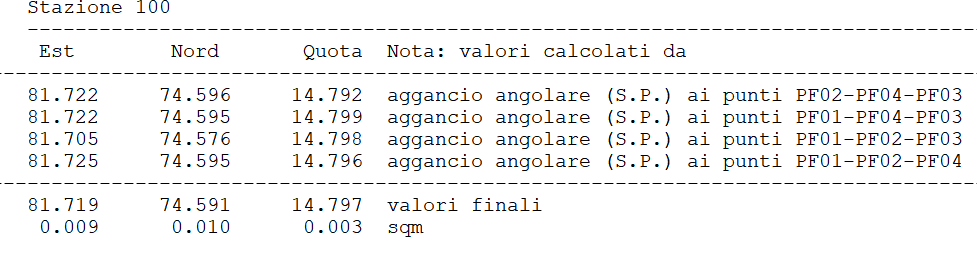
(7) - Snellius-Pothenot - Stazione libera che osserva solo angolarmente 3 (o più) punti rilevati da GPS o da altre stazioni
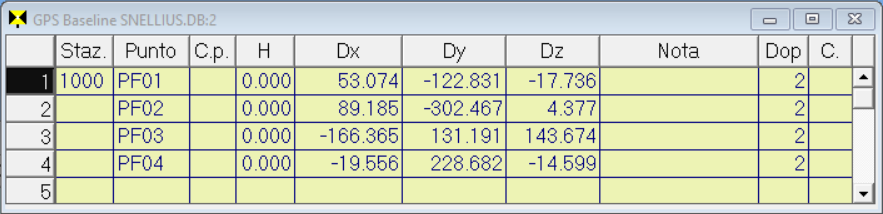
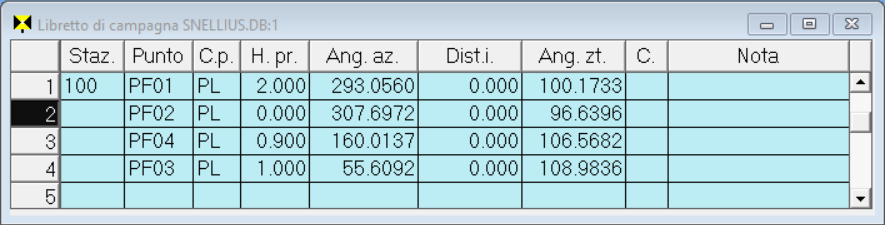
Questo schema applica il Teorema di Snellius-Pothenot risolvendolo anche con sovrabbondanza di punti osservati, cioè 4 o più. Nell’esempio che segue i n. 4 PF (ma possono essere ovviamente punti qualsiasi) sono stati rilevati da GPS, mentre la stazione libera 100 li osserva solo angolarmente:
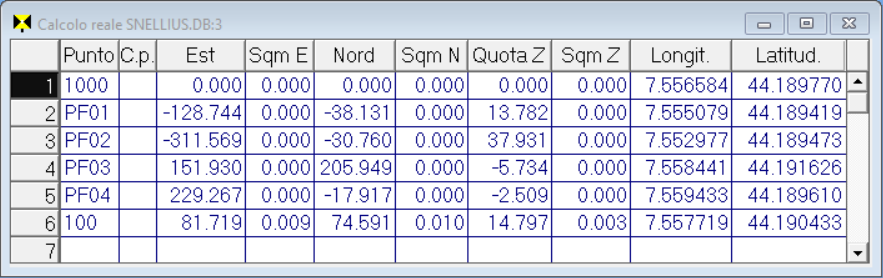
In questo caso, come detto, vengono calcolate con Snellius-Pothenot tutte le 4 terne di punti di aggancio, trovando le coordinate della stazione con la regola degli sqm:
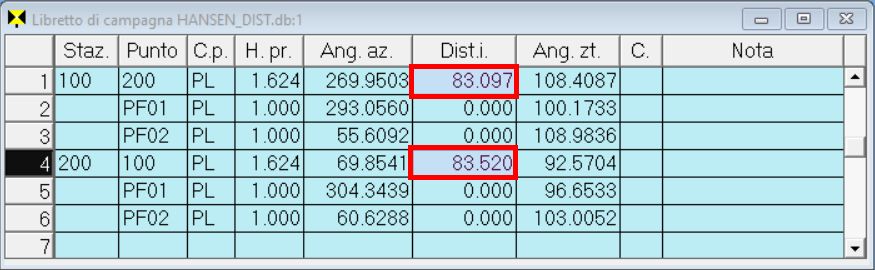
(8) - Hansen - Due stazioni libere che osservano angolarmente sia sé stesse che 2 punti rilevati da GPS o da altre stazioni
Questo schema è simile a quello di Snellius-Pothenot ma permette di calcolare una stazione libera anche quando i punti noti (rilevati da GPS o da altre stazioni) sono soltanto 2. In questo caso tuttavia è necessario osservare, anche solo angolarmente, una seconda stazione di appoggio:


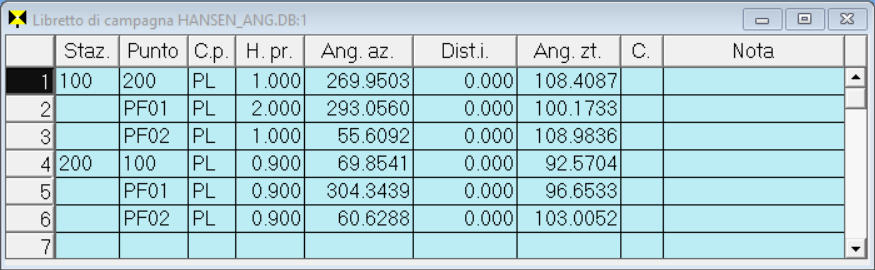
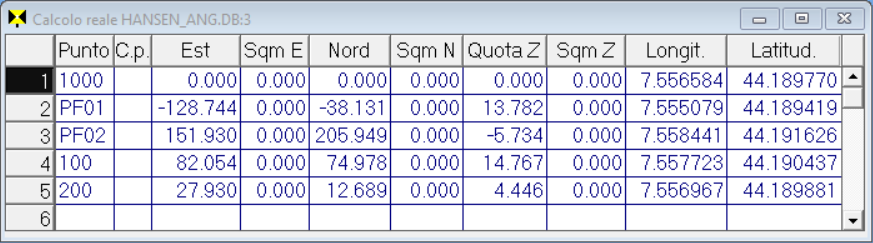
Ovviamente lo schema è applicabile anche nel caso (consigliato) in cui le due stazioni rilevino anche la loro distanza reciproca: